
精选百科
本文由作者推荐
惯性张量相关的文章

吉尔吉特-巴尔蒂斯坦(乌尔都语:شمالی علاقے,藏语:གིལྒིཏ་བལྟིསྟན),过去称北部地区(شمالی علاقہ جات),当地民族主义分子称为بلاوارستان,位于巴基斯坦控制的克什米尔的北部,是巴基斯坦最北的地区。面积72,496平方公里,2006年人口1,126,
斯图加特(德语:Stuttgart或译:斯图嘉特)位于德国西南部的巴登-符腾堡州中部内卡河谷地,靠近黑森林。不仅是该州的州首府,也是州级行政区及斯图加特地区首府和该州的第一大城市。同时也是该州的政治中心:巴符州议会、州政府,和众多的州政府机关部门均设在这里。由于其在经济、文化和行政方面的重要性,是德

偏头痛本词条是多义词,共2个义项原发性头痛类型偏头痛(migraine)是临床最常见的原发性头痛类型,临床以发作性中重度、搏动样头痛为主要表现,头痛多为偏侧,一般持续4~72小时,可伴有恶心、呕吐,光、声刺激或日常活动均可加重头痛,安静环境、休息可缓解头痛。偏头痛是一种常见的慢性神经血管性疾患,多起病于儿童和青春期,中青年期达发病高峰,女性多见,男女患者比例约为1∶2~3,人群中患病率为5%~10
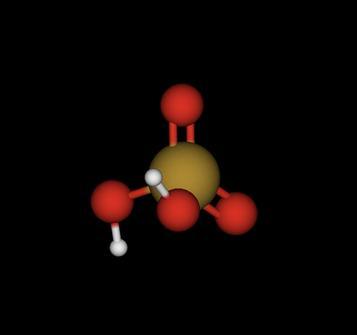
硫酸(Sulfuric acid)是一种二元无机强酸,又名硫酸油。是一种由硫、氧和氢元素组成的矿物酸,化学式为H₂SO₄。它是一种无色的油状液体,在任何浓度下都能与水互溶。纯硫酸密度很大,为1.8305g/cm³。纯硫酸沸点高达337℃,在25°C时蒸气压为0.001mmHg,属于难挥发性酸。浓硫酸还具有吸水性,可用作干燥剂;具有强氧化性和腐蚀性,是一种强氧化性酸;此外,还具有脱水性,可以按比例脱

尚可名片
这家伙太懒了,什么都没写!
作者
