直接转矩控制(Direct torque control,简称DTC)是一种变频器控制三相马达转矩的方式。其作法是依量测到的马达电压及电流,去计算马达磁通和转矩的估测值,而在控制转矩后,也可以控制马达的速度,直接转矩控制是欧洲ABB公司的专利。
精选百科
本文由作者推荐

直接转矩控制
变频器控制三相马达转矩的方式
中文名
直接转矩控制
外文名
Direct Torque Control
简称
DTC
性质
一种变频器控制三相马达转矩的方式
测量依据
测到的马达电压及电流
计算值
马达磁通和转矩的估测值
概述
直接转矩控制(Direct Torque Control——DTC),国外的原文有的也称为Direct self-control——DSC,直译为直接自控制,这种“直接自控制”的思想以转矩为中心来进行综合控制,不仅控制转矩,也用于磁链量的控制和磁链自控制。直接转矩控制与矢量控制的区别是,它不是通过控制电流、磁链等量间接控制转矩,而是把转矩直接作为被控量控制,其实质是用空间矢量的分析方法,以定子磁场定向方式,对定子磁链和电磁转矩进行直接控制的。这种方法不需要复杂的坐标变换,而是直接在电机定子坐标上计算磁链的模和转矩的大小,并通过磁链和转矩的直接跟踪实现PWM脉宽调制和系统的高动态性能。直接转矩控制(Direct Torque Control,DTC)变频调速,是继矢量控制技术之后又一新型的高效变频调速技术。20世纪80年代中期,德国鲁尔大学的M.Depenbrock教授和日本的I.Takahashi教授分别提出了六边形直接转矩控制方案和圆形直接转矩控制方案。1987年,直接转矩控制理论又被推广到弱磁调速范围。直接转矩控制技术用空间矢量的分析方法,直接在定子坐标系下计算与控制电动机的转矩,采用定子磁场定向,借助于离散的两点式调节(Band-Band)产生PWM波信号,直接对逆变器的开关状态进行最佳控制,以获得转矩的高动态性能。它省去了复杂的矢量变换与电动机的数学模型简化处理,没有通常的PWM 信号发生器。它的控制思想新颖,控制结构简单,控制手段直接,信号处理的物理概念明确。直接转矩控制也具有明显的缺点即:转矩和磁链脉动。
原理
在直接转矩控制中,电机定子磁链的幅值通过上述电压的矢量控制而保持为额定值,要改变转矩大小,可以通过控制定、转子磁链之间的夹角来实现。而夹角可以通过电压空间矢量的控制来调节。由于转子磁链的转动速度保持不变,因此夹角的调节可以通过调节定子磁链的瞬时转动速度来实现。假定电机转子逆时针方向旋转,如果实际转矩小于给定值,则选择使定子磁链逆时针方向旋转的电压矢量,这样角度增加,实际转矩增加,一旦实际转矩高与给定值,则选择电压矢量使定子磁链反方向旋转。从而导致角度降低。通过这种方式选择电压矢量,定子磁链一直旋转,且其旋转方向由转矩滞环控制器决定。直接转矩控制对转矩和磁链的控制要通过滞环比较器来实现。滞环比较器的运行原理为:当前值与给定值的误差在滞环比较器的容差范围内时,比较器的输出保持不变,一旦超过这个范围,滞环比较器便给出相应的值。直接转矩控制的原理,给定转速与估计转速相比较,得到给定转矩;经转矩调节器将转矩差做滞环处理得到转矩控制信号;将磁链估计值跟给定磁链相比,经滞环比较器得到磁链控制信号;根据计算的得到的转子位移,划分区段;根据区段,以及转矩和磁链控制信号,结合查找表得出空间矢量,生成PWM波;输出给逆变器,给电机供电。
控制特点
与VC系统一样,它也是分别控制异步电动机的转速和磁链,但在具体控制方法上,DTC系统与VC系统不同的特点是:
1)转矩和磁链的控制采用双位式砰-砰控制器,并在PWM逆变器中直接用这两个控制信号产生电压的SVPWM波形,从而避开了将定子电流分解成转矩和磁链分量,省去了旋转变换和电流控制,简化了控制器的结构。
2)选择定子磁链作为被控量,而不象VC系统中那样选择转子磁链,这样一来,计算磁链的模型可以不受转子参数变化的影响,提高了控制系统的鲁棒性。如果从数学模型推导按定子磁链控制的规律,显然要比按转子磁链定向时复杂,但是,由于采用了砰-砰控制,这种复杂性对控制器并没有影响。
3)由于采用了直接转矩控制,在加减速或负载变化的动态过程中,可以获得快速的转矩响应,但必须注意限制过大的冲击电流,以免损坏功率开关器件,因此实际的转矩响应的快速性也是有限的。
4)定子坐标系下分析电机的数学模型直接控制磁链和转矩,不需要和直流机比较、等效、转化,省去复杂的计算。
性能比较
从总体控制结构上看,直接转矩控制(DTC)系统和矢量控制(VC)系统是一致的,都能获得较高的静、动态性能。
技术改进
针对其不足之处,现在的直接转矩控制技术相对于早期的直接转矩控制技术有了很大的改进,主要体现在以下几个方面:
(1)无速度传感器直接转矩控制系统的研究
在实际应用中,安装速度传感器会增加系统成本,增加了系统的复杂性,降低系统的稳定性和可靠性,此外,速度传感器不实用于潮湿、粉尘等恶劣的环境下。因此,无速度传感器的研究便成了交流传动系统中的一个重要的研究方向,且取得了一定的成果。对转子速度估计的方法有很多,常用的有卡尔曼滤波器位置估计法、模型参考自适应法、磁链位置估计法、状态观测器位置估计法和检测电机相电感变化法等。有的学者从模型参考自适应理论出发,利用转子磁链方程构造了无速度传感器直接转矩控制系统,只要选择适当的参数自适应律,速度辨识器就可以比较准确地辨识出电机速度。
(2)定子电阻变化的影响
直接转矩最核心的问题之一是定子磁链观测,而定子磁链的观测要用到定子电阻。采用简单的u-i磁链模型,在中高速区,定子电阻的变化可以忽略不考虑,应用磁链的u-i磁链模型可以获得令人满意的效果;但在低速时定子电阻的变化将影响磁通发生畸变,使系统性能变差。因此,如果能够对定子电阻进行在线辨识,就可以从根本上消除定子电阻变化带来的影响。目前,常用的方法有参考模型自适应法、卡尔曼滤波法、神经网络以及模糊理论构造在线观测器的方法对定子电阻进行补偿,研究结果表明,在线辨识是一个有效的方法。
(3)磁链和转矩滞环的改进
传统的直接转矩控制一般对转矩和磁链采用单滞环控制,根据滞环输出的结果来确定电压矢量。因为不同的电压矢量对转矩和定子磁链的调节作用不相同,所以只有根据当前转矩和磁链的实时值来合理的选择。电压矢量,才能有可能使转矩和磁链的调节过程达到比较理想的状态。显然,转矩和磁链的偏差区分的越细,电压矢量的选择就越精确,控制性能也就越好。
(4)死区效应的解决
为了避免上下桥臂同时导通造成直流侧短路,有必要引入足够大的互锁延时,结果带来了死区效应。死区效应积累的误差使逆变器输出电压失真,于是又产生电流失真,加剧转矩脉动和系统运行不稳定等问题,在低频低压时,问题更严重,还会引起转矩脉动。死区效应的校正,可由补偿电路检测并记录死区时间,进行补偿。这样既增加了成本,又降低了系统的可靠性。可用软件实现的方法,即计算出所有的失真电压,根据电流方向制成补偿电压指令表,再用前向反馈的方式补偿,这种新型方案还消除了零电压箝位现象。除了以上几种最主要的方面外,一些学者还通过其他途径试图提高系统的性能。直接转矩控制的特征是控制定子磁链,是直接在定子静止坐标系下,以空间矢量概念,通过检测到的定子电压、电流,直接在定子坐标系下计算与控制电动机的磁链和转矩,获得转矩的高动态性能。它不需要将交流电动机化成等效直流电动机,因而省去了矢量变换中的许多复杂计算,它也不需要模仿直流电动机的控制,从而也不需要为解耦而简化交流电动机的数学模型,而只需关心电磁转矩的大小,因此控制上对除定子电阻外的所有电机参数变化鲁棒性良好,所引入的定子磁链观测器能很容易得到磁链模型,并方便地估算出同步速度信息,同时也很容易得到转矩模型,磁链模型和转矩模型就构成了完整的电动机模型,因而能方便地实现无速度传感器控制,如果在系统中再设置转速调节器,即可进一步得到高性能动态转矩控制了。需要说明的是,直接转矩控制的逆变器采用不同的开关器件,控制方法也有所不同。Depenbrock最初提出的直接自控制理论,主要在高压、大功率且开关频率较低的逆变器控制中广泛应用。目前被应用于通用变频器的控制方法是一种改进的、适合于高开关频率逆变器的方法。1995年ABB公司首先推出的ACS600系列直接转矩控制通用变频器,动态转矩响应速度已达到<2ms,在带速度传感器PG时的静态速度精度达土0.001%,在不带速度传感器PG的情况下即使受到输入电压的变化或负载突变的影响,同样可以达到±0.1%的速度控制精度。其他公司也以直接转矩控制为努力目标,如富士公司的FRENIC5000VG7S系列高性能无速度传感器矢量控制通用变频器,虽与直接转矩控制方式还有差别,但它也已做到了速度控制精度±0.005%,速度响应100Hz、电流响应800Hz和转矩控制精度±3%(带PG)。其他公司如日本三菱、日立、芬兰VASON等最新的系列产品采取了类似无速度传感器控制的设计,性能有了进一步提高
直接转矩控制相关的文章

脑炎是指脑实质受病原体侵袭导致的炎症性病变。绝大数的病因是病毒,也可由细菌、霉菌、螺旋体、立克次氏体、寄生虫等感染引起。脑炎的发病多因机体抵抗力下降,病原菌趁机通过呼吸道,消化道,性传播和密切接触等各种形式,经过血循环,透过血-脑屏障进入到大脑,或是脑组织邻近部位感染直接侵犯脑组织,从而引起脑炎的发

香妃墓(维吾尔文:ئىپارخان مازىرى)即阿巴克霍加麻札(墓)、阿帕克和卓麻札(墓)、阿巴和加麻札(墓)(维吾尔文:ئاپاق خوجا مازىرى),(另有和卓坟、香娘娘庙等旧称)是葬有阿巴和卓(阿巴和加、阿帕克和卓、阿帕霍加等)及其家族的陵墓,位于中华人民共和国新疆维吾尔自治区喀

伊比利亚半岛欧洲第二大半岛伊比利亚半岛(Ibérian Peninsula)位于欧洲西南角,东部、东南部临地中海,西边是大西洋,北临比斯开湾。比利牛斯山脉在半岛东北部,为天然界线与法国连接。南部隔着直布罗陀海峡与非洲对望。面积约58.4万平方公里,人口5200多万。包括西班牙、葡萄牙、安道尔和英属直布罗陀。伊比利亚半岛又称比利牛斯半岛,欧洲第二大半岛,南欧三大半岛之一(与意大利等国所在的亚平宁半岛
阿布基尔,埃及地中海沿岸村庄。在亚历山大东北21公里。东面的阿布基尔湾是渔场, 1798年尼罗河海战中,英、法舰队激战于此,法全军覆没,对拿破仑远征埃及的失败有重大影响。附近有海上天然气田,1977年开采。天然气通过管道供应亚历山大地区工业部门和电站,还供应阿布基尔化肥厂作原料。
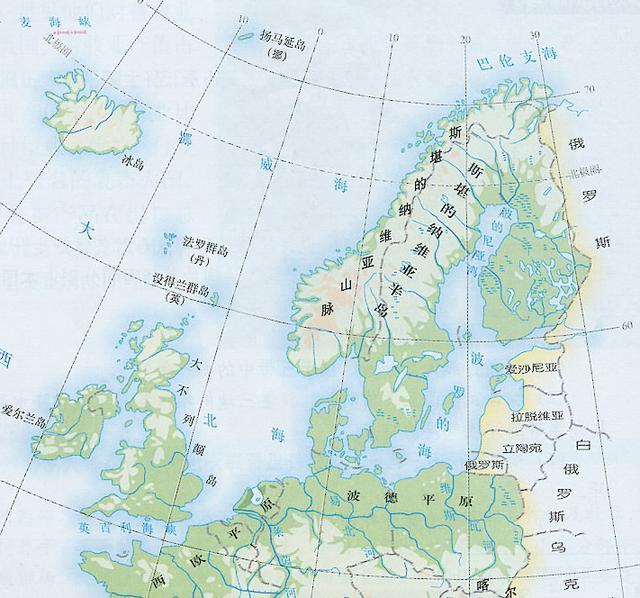
斯堪的纳维亚半岛(丹麦语:Skandinaviske halvø,瑞典语:Skandinaviska halvön,挪威语:Den skandinaviske halvøy,芬兰语:Skandinavian niemimaa),位于欧洲西北角,其濒临波罗的海、挪威海及北欧巴伦支海,与俄罗斯和芬兰北部接壤,北至芬兰,意为“斯堪的纳维亚人居住之地”。“斯堪的纳维亚”(Scandinavian)一词源自条顿语“skadino”,意为“黑暗”,再加上表示领土的后缀-via,全名意为“黑暗的地方”。因半岛 地处高纬

尚可名片
这家伙太懒了,什么都没写!
作者