
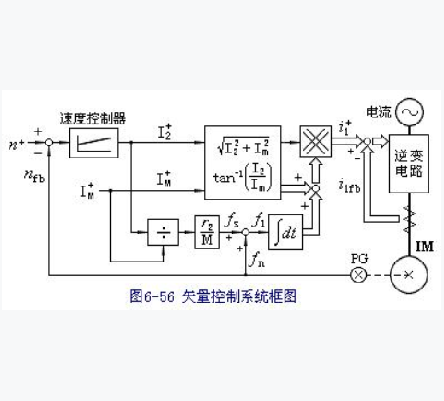
由于异步电机的动态数学模型是一个高阶、非线性、强耦合的多变量系统。上世纪60年代末由达姆斯塔特工业大学(TU Darmstadt)的K.Hasse提出。在70年代初由西门子工程师F.Blaschke在不伦瑞克工业大学(TU Braunschweig)发表的博士论文中提出三相电机磁场定向控制方法,通过异步电机矢量控制理论来解决交流电机转矩控制问题。矢量控制实现的基本原理是通过测量和控制异步电动机定子电流矢量,根据磁场定向原理分别对异步电动机的励磁电流和转矩电流进行控制,从而达到控制异步电动机转矩的目的。
精选百科
本文由作者推荐
矢量控制
磁场导向控制
中文名
矢量控制
外文名
vector control
年代
70年代
性质
控制
简介
矢量控制
(vector control
)也称为磁场导向控制
(field-oriented control
,简称FOC),是一种利用变频器(VFD)控制三相交流电机的技术,利用调整变频器的输出频率、输出电压的大小及角度,来控制电机的输出。其特性是可以个别控制电机的的磁场及转矩,类似他激式直流电机的特性。由于处理时会将三相输出电流及电压以矢量来表示,因此称为矢量控制。矢量控制可以适用在交流感应电机及直流无刷电机,早期开发的目的为了高性能的电机应用,可以在整个频率范围内运转、电机零速时可以输出额定转矩、且可以快速的加减速。不过相较于直流电机,矢量控制可配合交流电机使用,电机体积小,成本及能耗都较低,因此开始受到产业界的关注。矢量控制除了用在高性能的电机应用场合外,也已用在一些家电的应用中。
技术介绍
利用矢量控制,可以用类似控制他激直流电机的方式控制交流感应电机及同步电机。在他激直流电机中,磁场电流及电枢电流可独立控制,在矢量控制,控制磁场及电枢的电流互相垂直,理论上不会互相影响,因此当控制转矩时,不会影响产生磁场的磁链,因此可以有快速的转矩响应。
矢量控制会依照程式中计算的电流矢量,产生三相PWM的电压提供给电机,目的是要控制电机的三相电流。其中会将电流及电压等物理量在二个系统之间转换,一个是随速度及时间改变的三相系统,另一个则是二轴非线变的旋转坐标系统。
方式
采用矢量控制方式的通用变频器不仅可在调速范围上与直流电动机相匹配,而且可以控制异步电动机产生的转矩。由于矢量控制方式所依据的是准确的被控异步电动机的参数,有的通用变频器在使用时需要准确地输入异步电动机的参数,有的通用变频器需要使用速度传感器和编码器。鉴于电机参数有可能发生变化,会影响变频器对电机的控制性能,并根据辨识结果调整控制算法中的有关参数,从而对普通的异步电动机进行有效的矢量控制。
特点
- 需要量测(或是估测)电机的速度或位置,若估测电机的速度,需要电机电阻及电感等参数,若可能要配合多种不同的电机使用,需要自动调适(autotuning)程序来量测电机参数。
- 借由调整控制的目标值,转矩及磁通可以快速变化,一般可以在5-10毫秒内完成。
- 若使用PI控制,步阶响应会有过冲。
- 功率晶体的切换频率(载波)一般为定值。
- 转矩的精确度和控制系统中使用的电机参数有关,因此若因为电机温度变化.造成转子电阻阻值提高.会造成误差的变大。
- 对处理器效能的要求较高,至少每一毫秒需执行一次电机控制的算法。
举例
以异步电动机的矢量控制为例:
它首先通过电机的等效电路来得出一些磁链方程,包括定子磁链,气隙磁链,转子磁链,其中气隙磁链是连接定子和转子的。一般的感应电机转子电流不易测量,所以通过气隙来中转,把它变成定子电流。
然后,有一些坐标变换,
首先通过3/2变换,变成静止的d-q坐标,
然后通过前面的磁链方程产生的单位矢量来得到旋转坐标下的类似于直流机的转矩电流分量和磁场电流分量
,这样就实现了解耦控制,加快了系统的响应速度。最后再经过2/3变换,产生三相交流电去控制电机,这样就获得了良好的性能。
其他
矢量控制(VC)方式
矢量控制变频调速的做法是将异步电动机在三相坐标系下的定子电流Ia、Ib、Ic、通过三相-二相变换,等效成两相静止坐标系下的交流电流Ia1Ib1,再通过按转子磁场定向旋转变换,等效成同步旋转坐标系下的直流电流Im1、It1(Im1相当于直流电动机的励磁电流;It1相当于与转矩成正比的电枢电流),然后模仿直流电动机的控制方法,求得直流电动机的控制量,经过相应的坐标反变换,实现对异步电动机的控制。
其实质是将交流电动机等效为直流电动机,分别对速度,磁场两个分量进行独立控制。通过控制转子磁链,然后分解定子电流而获得转矩和磁场两个分量,经坐标变换,实现正交或解耦控制。
综合以上:矢量控制无非就四个知识:
等效电路、磁链方程、转矩方程、坐标变换
(包括静止和旋转)。矢量控制方法的提出具有划时代的意义。然而在实际应用中,由于转子磁链难以准确观测,系统特性受电动机参数的影响较大,且在等效直流电动机控制过程中所用矢量旋转变换较复杂,使得实际的控制效果难以达到理想分析的结果。
矢量控制相关的文章

《娜娜》(英语:Nana)改编自矢泽爱的同名漫画,由大谷健太郎执导,矢泽爱、浅野妙子编剧,中岛美嘉、宫崎葵、松田龙平等人主演的日本音乐、剧情电影,于2005年9月3日在日本上映。
柠檬精,网络流行词。其字面意思就是柠檬成精,用来表示自己很酸的感觉,指很喜欢酸别人,嫉妒别人,指嫉妒心很强,见不得别人比自己好,又自视清高的那种人。后来其贬义色彩逐渐淡化,多用于自嘲式地表达对他人从外貌到内在、从物质生活到情感生活的多重羡慕。
里斯本(葡萄牙语:Lisboa、英语:Lisbon),是葡萄牙共和国的首都。位于该国西部,城北为辛特拉山,城南临塔古斯河,距离大西洋不到12公里,是欧洲大陆最西端的城市,也是南欧著名的都市之一。里斯本是工业城市、国际化都市,如今是葡萄牙的政治、经济、文化、教育中心,亦是欧洲著名的旅游城市,每年接待游
小编整理:二等奖是一种奖项设置中处于第二层次的奖励,通常表示在特定比赛或评价标准中取得了一定程度的成就,但未达到一等奖的水平。具体奖励内容可能因不同的比赛或评价标准而异,但通常会包括一些实质性的奖品或奖金,以及一些象征性的荣誉,例如获奖证书、奖杯或荣誉称号等。

拉丁语(Lingua Latīna)属于印欧语系意大利语族,起源拉丁姆地区(意大利的拉齐奥区)为罗马帝国使用。虽然拉丁语通常被认为是一种死语言,但有少数基督宗教神职人员及学者可流利使用拉丁语。罗马天主教传统上用拉丁语作为正式会议的语言和礼拜仪式用的语言。此外,许多西方国家的大学提供有关拉丁语的课程。在英语和其他西方语言创造新词的过程中,拉丁语一直得以使用。拉丁语是意大利语族(Italic Languages)中仅存的一支。通过对早期意大利遗留文献的研究,可以证实其他意大利语族分支的存在,之后这些分支在罗马

尚可名片
这家伙太懒了,什么都没写!
作者

