三维笛卡儿坐标系是在二维笛卡儿坐标系的基础上根据右手定则增加第三维坐标(即Z轴)而形成的。同二维坐标系一样,AutoCAD中的三维坐标系有世界坐标系WCS(World Coordinate System)和用户坐标系UCS(User Coordinate System)两种形式。
精选百科
本文由作者推荐
三维坐标系
根据右手定则形成的坐标系
中文名
三维坐标系
外文名
3 d coordinate system
包含定理
右手定则
形成基础
二维笛卡儿坐标系
形式种类
世界坐标系、用户坐标系
右手定则
在三维坐标系中,Z轴的正轴方向是根据右手定则确定的。右手定则也决定三维空间中任一坐标轴的正旋转方向。
要标注X、Y和Z轴的正轴方向,就将右手背对着屏幕放置,拇指即指向X轴的正方向。伸出食指和中指,如右图所示,食指指向Y轴的正方向,中指所指示的方向即是Z轴的正方向。

三维坐标系
要确定轴的正旋转方向,如右图所示,用右手的大拇指指向轴的正方向,弯曲手指。那么手指所指示的方向即是轴的正旋转方向。
世界坐标系
2.世界坐标系(WCS)
在AutoCAD中,三维世界坐标系是在二维世界坐标系的基础上根据右手定则增加Z轴而形成的。同二维世界坐标系一样,三维世界坐标系是其他三维坐标系的基础,不能对其重新定义。
用户坐标系
3.用户坐标系(UCS)
用户坐标系为坐标输入、操作平面和观察提供一种可变动的坐标系。定义一个用户坐标系即改变原点(0,0,0)的位置以及XY平面和Z轴的方向。可在AutoCAD的三维空间中任何位置定位和定向UCS,也可随时定义、保存和复用多个用户坐标系。详见本章第3节。
三维坐标形式
在AutoCAD中提供了下列三种三维坐标形式:
1.三维笛卡尔坐标
三维笛卡尔坐标(X,Y,Z)与二维笛卡尔坐标(X,Y)相似,即在X和Y值基础上增加Z值。同样还可以使用基于当前坐标系原点的绝对坐标值或基于上个输入点的相对坐标值。
2.圆柱坐标
圆柱坐标与二维极坐标类似,但增加了从所要确定的点到XY平面的距离值。即三维点的圆柱坐标可通过该点与UCS原点连线在XY平面上的投影长度,该投影与X轴夹角、以及该点垂直于XY平面的Z值来确定。例如,坐标“

圆柱坐标也有相对的坐标形式,如相对圆柱坐标“

3.球面坐标
球面坐标也类似与二维极坐标。在确定某点时,应分别指定该点与当前坐标系原点的距离,二者连线在XY平面上的投影与X轴的角度,以及二者连线与XY平面的角度。例如,坐标“

同样,圆柱坐标的相对形式表明了某点与上个输入点的距离,二者连线在XY平面上的投影与X轴的角度,以及二者连线与XY平面的角度。
注:
1) 在平面直角坐标系中,分别取与x轴、y轴方向相同的两个单位向量i,j作为一组基底。a为平面直角坐标系内的任意向量,以坐标原点O为起点作向量



2) 在立体三维坐标系中,分别取与x轴、y轴,z轴方向相同的3个单位向量i,j, k作为一组基底。若a为该坐标系内的任意向量,以坐标原点O为起点作向量
,使得


三维笛卡尔坐标(X,Y,Z)是在三维笛卡尔坐标系下的点的表达式,其中,x,y,z分别是拥有共同的零点且彼此相互正交的x轴,y轴,z轴的坐标值。
圆柱坐标系圆柱坐标(ρ,θ,z)是圆柱坐标系上的点的表达式。设P(x,y,z)为空间内一点,则点P也可用这样三个有次序的数ρ,θ,z来确定,其中ρ为点P在xoy平面的投影M与原点的距离,θ为有向线段PO在xoy平面的投影MO与x轴正向所夹的角。圆柱坐标系和三维笛卡尔坐标系的点的坐标的对应关系是,

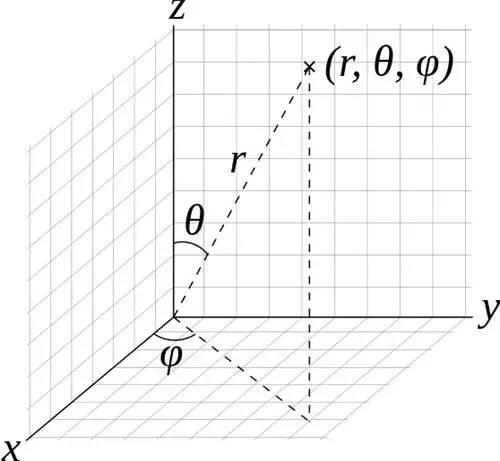
球面坐标系由到原点的距离、方位角、仰角三个维度构成。球面坐标(ρ,θ,φ)是球面坐标系上的点的表达式。设P(x,y,z)为空间内一点,则点P也可用这样三个有次序的数r,φ,θ来确定,其中r为原点O与点P间的距离,θ为有向线段与z轴正向所夹的角,φ为从正z轴来看自x轴按逆时针方向转到有向线段的角,这里M为点P在xOy面上的投影。这样的三个数r,φ,θ叫做点P的球面坐标,这里r,φ,θ的变化范围为







三维坐标系相关的文章

死亡是一种自然现象,即生物失去生命,它是一切生命有机体发展的必然归宿。随着医学科技的发展,患者的心跳、呼吸、血压等生命体征都可以通过一系列药物和先进设备加以逆转或长期维持。而脑死亡是全脑功能包括脑干功能不可逆的终止。人体的呼吸中枢位于脑干,如果脑干发生结构性破坏,会直接导致呼吸功能停止,无论采取何种
拜城县(英文:Bay County),位于新疆维吾尔自治区西南部,阿克苏地区东北部。北依天山与昭苏、特克斯县相连,南隔却勒塔格山与新和县为界,东与库车县毗邻,西与温宿县接壤。总面积15916.81平方千米,根据第七次人口普查数据显示拜城县常住人口为231113人。有维吾尔、汉、回、哈萨克、柯尔克孜等
小编整理:库尔勒香梨是一种属于蔷薇科梨属植物的果实,它生长在天山高山上的野杜梨籽育苗作为砧木,具有抗寒、抗旱、抗病虫害的优势。它的特点包括皮薄、果心中大、果肉白色、肉质细腻酥脆、汁多味甜、近核部微酸,完熟后有香味、可溶性固型物含量11-14%,品质极上。库尔勒
鲁奇乌斯·多米提乌斯·奥勒里安努斯(Lucius Domitius Aurelianus,通常译作奥勒良,214年9月9日-275年9月),罗马皇帝,公元270年-275年在位。在他的统治期间,收复了罗马帝国曾经失去的三分之二的疆域,将分裂50年的帝国再次统合,使罗马帝国在3世纪末至4世纪初恢复重新统一。他的统治初步解决了罗马帝国的三世纪危机,是几位成功的军人出身的皇帝中的第二位。可惜最后遭到暗杀。

尚可名片
这家伙太懒了,什么都没写!
作者