
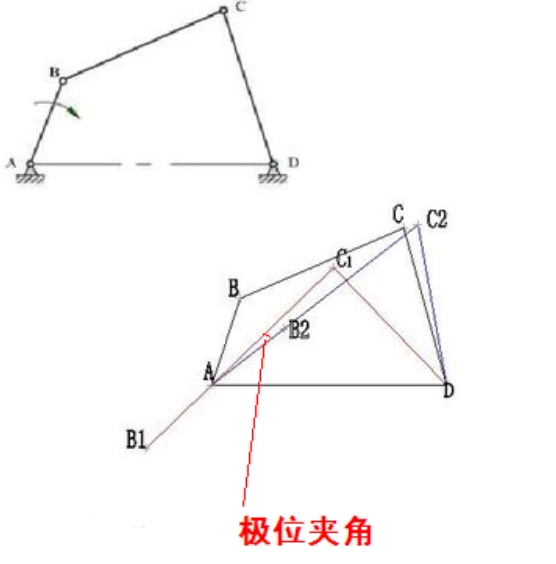
曲柄摇杆机构,在曲柄转动一周的过程中,有两次与连杆共线,这时摇杆分别处于两个极限位置。机构所处的这两个位置称为极位。机构在两个极位时,原动件所在两个位置之间的夹角称为极位夹角θ。
精选百科
本文由作者推荐
极位夹角
原动件所在两个位置之间的夹角
中文名
极位夹角
外文名
crankanglebetweentwolimitpositions
符号
θ
定义
机构在两个极位时,原动件所在两个位置之间的夹角
定义
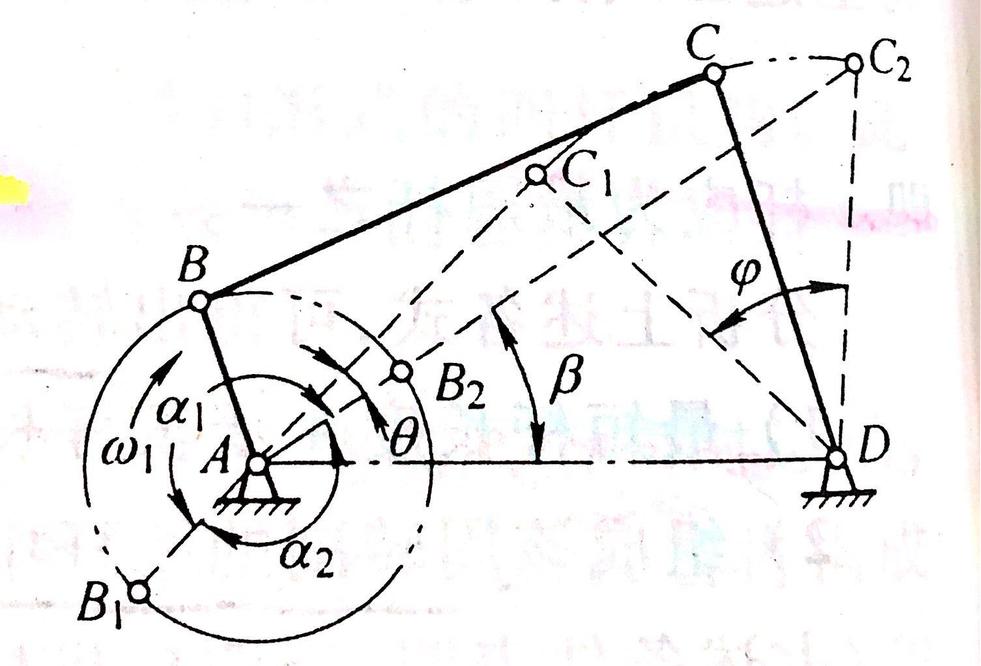
图1 四杆机构的极位夹角

极位夹角
如图1所示为一曲柄摇杆机构,设曲柄AB为原动件,在其转动一周的过程中,有两次与连杆共线,这时摇杆CD分别处于两极限位置CD和CD。机构所处的这两个位置称为极位。机构在两个位置时,原动件AB所在两个位置之间的夹角称为极位夹角。
四杆机构
急回运动出现如图1所示,当曲柄以等角速度 顺时针转过时,摇杆将由位置 摆到,其摆角为,设所需时间为,点的平均速度为;当曲柄继续转过时,摇杆又从位置回转到,摆角仍然是,所需的时间是,点的平均速度为。由于曲柄为等角速度转动,而所以有。摇杆这种性质的运动称为急回运动。

极位夹角

极位夹角

极位夹角

极位夹角

极位夹角

极位夹角

极位夹角

极位夹角

极位夹角
极位夹角
极位夹角
极位夹角

极位夹角
极位夹角

极位夹角

极位夹角

极位夹角

极位夹角
急回运动衡量
极位夹角
为了表明急回运动的急回程度,可用行程速度变化系数或称行程系数来衡量,即:急回运动衡量为了表明急回运动的急回程度,可用行程速度变化系数或称行程系数 来衡量,即:
上式表明,当机构存在极位夹角 的时候,机构便具有急回运动特性,角越大,值越大,机构的急回运动性质也越明显。
判断是否存在
判断机构是否存在急回运动:
无急回运动
有急回运动
工程上的应用
机构的急回特性在工程上有三种应用情况:
工作行程要求慢速前进。
对某些颚式破碎机,要求其颚快进慢回使被被破碎的矿石能及时推出颚板,避免矿石的过粉碎(因破碎后的矿石有一定粒度要求)。
一些设备在正、反行程中均在工作,故无急回运动。某些机载搜索雷达的摇头机构就是如此。
机构的设计
在设计时,应先明确行程速度变化系数,求出 角后,再设计各杆的尺寸。

极位夹角
极位夹角
极位夹角
极位夹角
判断是否存在判断机构是否存在急回运动:

极位夹角
(1)无急回运动
极位夹角
(2)有急回运动工程上的应用机构的急回特性在工程上有三种应用情况:
(1)工作行程要求慢速前进,以利切削、冲压等工作的进行,而回程时为节省空间时间,则要求快速扳回,如牛头刨床、插床等就是如此,这是常见的情况。
(2)对某些颚式破碎机,要求其颚快进慢回,使以被破碎的矿石能及时推出颚板,避免矿石的过粉碎(因破碎后的矿石有一定粒度要求)。
(3)一些设备在正、反行程中均在工作,故无急回运动。某些机载搜索雷达的摇头机构就是如此。
机构的设计
极位夹角
极位夹角
在设计时,应先明确行程速度变化系数,求出角后,再设计各杆的尺寸。

极位夹角
曲柄摇杆机构
按给定的行程速比系数设计
在设计需要有急回特性的四杆机构时,常按实际要求先给定行程速比系数K,再根据机构在极限位置的几何关系及有关辅助条件,设计出机构各构件的位置和尺寸。
已知:如图2所不,摇杆长度CD,摇杆摆角,行程速比系数。求:确定铰链A的位置,并定出A、BC、AD三杆长度。图2按K设计曲柄摇杆机构
如图2所示,任选一点,由已知 杆长和摆角 画出其两极限位置并得到、铰链点。连接 再作。由已知的 代入式 计算出极位夹角。作。与 交于 点。由 三个内角之和为180°可知, 。作 的外接圆,在除 和 圆弧的圆弧上任选一点 作为固定铰链点。连接 和 得夹角 (同一圆周角相等)。因两极限位置处曲柄 和连杆 共线,故可得 在 的延长线上,在 线之间。先初取、点并使 和 相等。由其几何关系应得, ,于是得到曲柄。再以 为圆心 为半径作圆,交 的延长线于正式取得的 点,交至于于正式取得的 点。
因A点是在外接圆上任取的一点,故此题的结果可有无穷多。如果要取得良好的传动质量,可再按照最小传动角最优或其他辅助条件来最终确定A的位置。
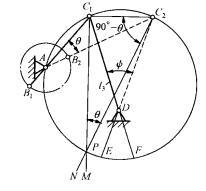
图2 按K设计曲柄摇杆机构
极位夹角
极位夹角
已知:如图2所示,摇杆长度CD,摇杆摆角,行程速比系数。求:确定铰链A的位置,并定出A、BC、AD三杆长度。
导杆机构
按给定的行程数比设计
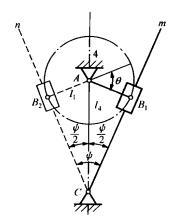
图3 按K设计导杆机构
极位夹角
极位夹角

极位夹角

极位夹角

极位夹角
极位夹角

极位夹角

极位夹角

极位夹角
极位夹角
极位夹角

极位夹角

极位夹角
极位夹角

极位夹角

极位夹角

极位夹角
极位夹角
极位夹角
极位夹角

极位夹角

极位夹角

极位夹角

极位夹角
已知:如图3所示,机架长度AC,行程速比系数。求:AB杆长度。由已知的代人式中计算出极位夹角。在四边形中,因和恒为直角,故和导杆摆角均与互补,故驴。现任选一点作固定铰链,以摆角作出导杆的两个极限位置和。作的角平分线,并取点使等于已知的机架长度。再过点作导杆两极限位置和的垂线,分别交于、点。于是得到,或即为曲柄的长度。
极位夹角相关的文章

脑炎是指脑实质受病原体侵袭导致的炎症性病变。绝大数的病因是病毒,也可由细菌、霉菌、螺旋体、立克次氏体、寄生虫等感染引起。脑炎的发病多因机体抵抗力下降,病原菌趁机通过呼吸道,消化道,性传播和密切接触等各种形式,经过血循环,透过血-脑屏障进入到大脑,或是脑组织邻近部位感染直接侵犯脑组织,从而引起脑炎的发
陈欣健(外文名:Philip Chan),1945年1月25日出生,是中国香港人。中国香港演员、编剧、导演、制片人、主持人。香港电影导演协会永远名誉会长、金像奖副主席、香港影艺人协会名誉理事。在中学时期组建了香港第一支华人校园流行乐队。

刘慈欣谈科幻《刘慈欣谈科幻(第1辑)》有作者在创作科幻小说时的心路历程,有作者对一些经典科幻作品的精彩书评、影评,还有一些对话与访谈,折射出作者作为一个科幻迷对科幻、对未来的看法,也展现出科幻作家独特的浪漫主义情怀。

小米本词条是多义词,共25个义项禾本科狗尾草属植物小米(学名:Setaria italica var. germanica (Mill.) Schred.)又称为粟,北方称谷子,谷子脱壳为小米,其粒小,直径1mm左右。小米是世界上最古老的栽培农作物之一,起源于中国黄河流域,是中国古代的主要粮食作物。粟生长耐旱,品种繁多,俗称“粟有五彩”,有白、红、黄、黑、橙、紫等各种颜色的小米,也有黏性小米。中国

尚可名片
这家伙太懒了,什么都没写!
作者

