傅立叶变换,表示能将满足一定条件的某个函数表示成三角函数(正弦和/或余弦函数)或者它们的积分的线性组合。在不同的研究领域,傅立叶变换具有多种不同的变体形式,如连续傅立叶变换和离散傅立叶变换。最初傅立叶分析是作为热过程的解析分析的工具被提出的。
精选百科
本文由作者推荐

傅里叶变换
一种分析信号的方法
中文名
傅里叶变换
外文名
Fourier Transform
别名
傅立叶展开
提出者
傅立叶
提出时间
1807年
应用学科
数字信号处理
适用领域
电工学
所属学科
傅里叶分析
概念简介
Fourier transform
或Transformée de Fourier
有多个中文译名,常见的有“傅里叶变换
”、“付立叶变换
”、“傅立叶转换
”、“傅氏转换
”、“傅氏变换
”、等等。为方便起见,本文统一写作“傅里叶变换”。傅立叶变换是一种分析信号的方法,它可分析信号的成分,也可用这些成分合成信号。许多波形可作为信号的成分,比如正弦波、方波、锯齿波等,傅立叶变换用正弦波作为信号的成分。
定义介绍f(t)是t的周期函数,如果t满足狄里赫莱条件:在一个以2T为周期内f(X)连续或只有有限个第一类间断点,附f(x)单调或可划分成有限个单调区间,则F(x)以2T为周期的傅里叶级数收敛,和函数S(x)也是以2T为周期的周期函数,且在这些间断点上,函数是有限值;在一个周期内具有有限个极值点;绝对可积。则有①式成立。称为积分运算f(t)的
傅立叶变换
,②式的积分运算叫做F(ω)的
傅立叶逆变换
。F(ω)叫做f(t)的像函数
,f(t)叫做F(ω)的
像
原函数。F(ω)是f(t)的像。f(t)是F(ω)原像。①傅立叶变换

②傅立叶逆变换

傅里叶变换在物理学、电子类学科、数论、组合数学、信号处理、概率论、统计学、密码学、声学、光学、海洋学、结构动力学等领域都有着广泛的应用(例如在信号处理中,傅里叶变换的典型用途是将信号分解成频率谱——显示与频率对应的幅值大小)。
相关理论*傅里叶变换属于谐波分析。
*傅里叶变换的逆变换容易求出,而且形式与正变换非常类似;
*正弦基函数是微分运算的本征函数,从而使得线性微分方程的求解可以转化为常系数的代数方程的求解。在线性时不变的物理系统内,频率是个不变的性质,从而系统对于复杂激励的响应可以通过组合其对不同频率正弦信号的响应来获取;
*卷积定理指出:傅里叶变换可以化复杂的卷积运算为简单的乘积运算,从而提供了计算卷积的一种简单手段;
*离散形式的傅立叶变换可以利用数字计算机快速地算出(其算法称为快速傅里叶变换算法(FFT)).
通俗解释首页,使用正余弦波,理论上可以叠加为一个矩形。
一个余弦波cos(x)
2个余弦波的叠加

4个余弦波的叠加
10个余弦波的叠加
随着正弦波数量逐渐的增长,他们最终会叠加成一个标准的矩形,大家从中体会到了什么道理?
不仅仅是矩形,你能想到的任何波形都是可以如此方法用正弦波叠加起来的。这是没有接触过傅里叶分析的人在直觉上的第一个难点,但是一旦接受了这样的设定,游戏就开始有意思起来了。
正弦波累加成矩形波,我们换一个角度来看看:
这就是矩形波在频域的样子,是不是完全认不出来了?教科书一般就给到这里然后留给了读者无穷的遐想,以及无穷的吐槽,其实教科书只要补一张图就足够了:频域图像,也就是俗称的频谱。
可以发现,在频谱中,偶数项的振幅都是0,也就对应了图中的彩色直线。振幅为0的正弦波。
性质
线性性质傅里叶变换的线性,是指两函数的线性组合的傅里叶变换,等于这两个函数分别做傅里叶变换后再进行线性组合的结果。具体而言,假设函数







若函数







![]()
若函数

若函数




若函数


即导函数的傅里叶变换等于原函数的傅里叶变换乘以因子




若函数



若


若函数




特殊变换
连续一般情况下,若“傅里叶变换”一词的前面未加任何限定语,则指的是“连续傅里叶变换”。“连续傅里叶变换”将平方可积的函数


上式其实表示的是连续傅里叶变换的逆变换,即将时间域的函数表示为频率域的函数
当
连续形式的傅里叶变换其实是傅里叶级数的推广,因为积分其实是一种极限形式的求和算子而已。对于周期函数,它的傅里叶级数(Fourier series)表示被定义为:







离散时间傅里叶变换(discrete-time Fourier transform, DTFT)针对的是定义域为Z的数列。设



离散傅里叶变换
为了在科学计算和数字信号处理等领域使用计算机进行傅里叶变换,必须将函数定义在离散点上而非连续域内,且须满足有限性或周期性条件。这种情况下,序列


其逆变换为



在阿贝尔群上的统一描述
以上各种傅里叶变换可以被更统一的表述成任意局部紧致的阿贝尔群上的傅里叶变换。这一问题属于调和分析的范畴。在调和分析中,一个变换从一个群变换到它的对偶群(dual group)。此外,将傅里叶变换与卷积相联系的卷积定理在调和分析中也有类似的结论。
傅里叶变换家族
下表列出了傅里叶变换家族的成员。容易发现,函数在时(频)域的离散对应于其像函数在频(时)域的周期性,反之连续则意味着在对应域的信号的非周期性。
相关
变换提出傅里叶是一位法国数学家和物理学家的名字,英语原名是Jean Baptiste Joseph Fourier(1768-1830), Fourier对热传递很感兴趣,于1807年在法国科学学会上发表了一篇论文,运用正弦曲线来描述温度分布,论文里有个在当时具有争议性的决断:任何连续周期信号可以由一组适当的正弦曲线组合而成。当时审查这个论文的人,其中有两位是历史上著名的数学家拉格朗日(Joseph Louis Lagrange, 1736-1813)和拉普拉斯(Pierre Simon de Laplace, 1749-1827),当拉普拉斯和其它审查者投票通过并要发表这个论文时,拉格朗日坚决反对,在他此后生命的六年中,拉格朗日坚持认为傅里叶的方法无法表示带有棱角的信号,如在方波中出现非连续变化斜率。法国科学学会屈服于拉格朗日的威望,拒绝了傅里叶的工作,幸运的是,傅里叶还有其它事情可忙,他参加了政治运动,随拿破仑远征埃及,法国大革命后因会被推上断头台而一直在逃避。直到拉格朗日死后15年这个论文才被发表出来。
拉格朗日是对的:正弦曲线无法组合成一个带有棱角的信号。但是,我们可以用正弦曲线来非常逼近地表示它,逼近到两种表示方法不存在能量差别,基于此,傅里叶是对的。
用正弦曲线来代替原来的曲线而不用方波或三角波来表示的原因在于,分解信号的方法是无穷的,但分解信号的目的是为了更加简单地处理原来的信号。
用三角函数展开为什么偏偏选择三角函数而不用其他函数进行分解?我们从物理系统的特征信号角度来解释。我们知道:大自然中很多现象可以抽象成一个线性时不变系统来研究,无论你用微分方程还是传递函数或者状态空间描述。线性时不变系统可以这样理解:输入输出信号满足线性关系,而且系统参数不随时间变换。对于大自然界的很多系统,一个正弦曲线信号输入后,输出的仍是正弦曲线,只有幅度和相位可能发生变化,但是频率和波的形状仍是一样的。也就是说正弦信号是系统的特征向量!当然,指数信号也是系统的特征向量,表示能量的衰减或积聚。自然界的衰减或者扩散现象大多是指数形式的,或者既有波动又有指数衰减(复指数


傅里叶变换
用正弦曲线来代替原来的曲线而不用方波或三角波或者其他什么函数来表示的原因在于:正弦信号恰好是很多线性时不变系统的特征向量。于是就有了傅里叶变换。对于更一般的线性时不变系统,复指数信号(表示耗散或衰减)是系统的“特征向量”。于是就有了拉普拉斯变换。z变换也是同样的道理,这时是离散系统的“特征向量”。这里没有区分特征函数和特征向量的概念,主要想表达二者的思想是相同的,只不过一个是有限维向量,一个是无限维函数。傅里叶级数和傅里叶变换其实就是我们之前讨论的特征值与特征向量的问题。分解信号的方法是无穷的,但分解信号的目的是为了更加简单地处理原来的信号。这样,用正余弦来表示原信号会更加简单,因为正余弦拥有原信号所不具有的性质:正弦曲线保真度。且只有正弦曲线才拥有这样的性质。
这也解释了为什么我们一碰到信号就想方设法的把它表示成正弦量或者复指数量的形式;为什么方波或者三角波如此“简单”,我们非要展开的如此“麻烦”;为什么对于一个没有什么规律的“非周期”信号,我们都绞尽脑汁的用正弦量展开。就因为正弦量(或复指数)是特征向量。
时域频域什么是时域?从我们出生,我们看到的世界都以时间贯穿,股票的走势、人的身高、汽车的轨迹都会随着时间发生改变。这种以时间作为参照来观察动态世界的方法我们称其为时域分析。而我们也想当然的认为,世间万物都在随着时间不停的改变,并且永远不会静止下来。
什么是频域?频域(frequency domain)是描述信号在频率方面特性时用到的一种坐标系。用线性代数的语言就是装着正弦函数的空间。频域最重要的性质是:它不是真实的,而是一个数学构造。频域是一个遵循特定规则的数学范畴。正弦波是频域中唯一存在的波形,这是频域中最重要的规则,即正弦波是对频域的描述,因为时域中的任何波形都可用正弦波合成。
对于一个信号来说,信号强度随时间的变化规律就是时域特性,信号是由哪些单一频率的信号合成的就是频域特性。
时域分析与频域分析是对信号的两个观察面。时域分析是以时间轴为坐标表示动态信号的关系;频域分析是把信号变为以频率轴为坐标表示出来。一般来说,时域的表示较为形象与直观,频域分析则更为简练,剖析问题更为深刻和方便。目前,信号分析的趋势是从时域向频域发展。然而,它们是互相联系,缺一不可,相辅相成的。贯穿时域与频域的方法之一,就是传说中的傅里叶分析。傅里叶分析可分为傅里叶级数(Fourier Serie)和傅里叶变换(Fourier Transformation)。
变换分类根据原信号的不同类型,我们可以把傅里叶变换分为四种类别:
1非周期性连续信号傅里叶变换(Fourier Transform)
2周期性连续信号傅里叶级数(Fourier Series)
3非周期性离散信号离散时域傅里叶变换(Discrete Time Fourier Transform)
4周期性离散信号离散傅里叶变换(Discrete Fourier Transform)
是四种原信号图例:
这四种傅里叶变换都是针对正无穷大和负无穷大的信号,即信号的的长度是无穷大的,我们知道这对于计算机处理来说是不可能的,那么有没有针对长度有限的傅里叶变换呢?没有。因为正余弦波被定义成从负无穷大到正无穷大,我们无法把一个长度无限的信号组合成长度有限的信号。面对这种困难,方法是把长度有限的信号表示成长度无限的信号,可以把信号无限地从左右进行延伸,延伸的部分用零来表示,这样,这个信号就可以被看成是非周期性离解信号,我们就可以用到离散时域傅里叶变换的方法。还有,也可以把信号用复制的方法进行延伸,这样信号就变成了周期性离散信号,这时我们就可以用离散傅里叶变换方法进行变换。这里我们要学的是离散信号,对于连续信号我们不作讨论,因为计算机只能处理离散的数值信号,我们的最终目的是运用计算机来处理信号的。
但是对于非周期性的信号,我们需要用无穷多不同频率的正弦曲线来表示,这对于计算机来说是不可能实现的。所以对于离散信号的变换只有离散傅里叶变换(DFT)才能被适用,对于计算机来说只有离散的和有限长度的数据才能被处理,对于其它的变换类型只有在数学演算中才能用到,在计算机面前我们只能用DFT方法,后面我们要理解的也正是DFT方法。这里要理解的是我们使用周期性的信号目的是为了能够用数学方法来解决问题,至于考虑周期性信号是从哪里得到或怎样得到是无意义的。
每种傅里叶变换都分成实数和复数两种方法,对于实数方法是最好理解的,但是复数方法就相对复杂许多了,需要懂得有关复数的理论知识,不过,如果理解了实数离散傅里叶变换(real DFT),再去理解复数傅里叶就更容易了,所以我们先把复数的傅里叶放到一边去,先来理解实数傅里叶变换,在后面我们会先讲讲关于复数的基本理论,然后在理解了实数傅里叶变换的基础上再来理解复数傅里叶变换。

傅里叶变换
如所示,实信号四种变换在时域和频域的表现形式。还有,这里我们所要说的变换(transform)虽然是数学意义上的变换,但跟函数变换是不同的,函数变换是符合一一映射准则的,对于离散数字信号处理(DSP),有许多的变换:傅里叶变换、拉普拉斯变换、Z变换、希尔伯特变换、离散余弦变换等,这些都扩展了函数变换的定义,允许输入和输出有多种的值,简单地说变换就是把一堆的数据变成另一堆的数据的方法。
变换意义傅里叶变换是数字信号处理领域一种很重要的算法。要知道傅里叶变换算法的意义,首先要了解傅里叶原理的意义。傅里叶原理表明:任何连续测量的时序或信号,都可以表示为不同频率的正弦波信号的无限叠加。而根据该原理创立的傅里叶变换算法利用直接测量到的原始信号,以累加方式来计算该信号中不同正弦波信号的频率、振幅和相位。
和傅里叶变换算法对应的是反傅里叶变换算法。该反变换从本质上说也是一种累加处理,这样就可以将单独改变的正弦波信号转换成一个信号。因此,可以说,傅里叶变换将原来难以处理的时域信号转换成了易于分析的频域信号(信号的频谱),可以利用一些工具对这些频域信号进行处理、加工。最后还可以利用傅里叶反变换将这些频域信号转换成时域信号。
从现代数学的眼光来看,傅里叶变换是一种特殊的积分变换。它能将满足一定条件的某个函数表示成正弦基函数的线性组合或者积分。在不同的研究领域,傅里叶变换具有多种不同的变体形式,如连续傅里叶变换和离散傅里叶变换。
在数学领域,1. 傅里叶变换是线性算子,若赋予适当的范数,它还是酉算子;2. 傅里叶变换的逆变换容易求出,而且形式与正变换非常类似;3. 正弦基函数是微分运算的本征函数,从而使得线性微分方程的求解可以转化为常系数的代数方程的求解。在线性时不变杂的卷积运算为简单的乘积运算,从而提供了计算卷积的一种简单手段;4. 离散形式的傅里叶的物理系统内,频率是个不变的性质,从而系统对于复杂激励的响应可以通过组合其对不同频率正弦信号的响应来获取;5. 著名的卷积定理指出:傅里叶变换可以化复变换可以利用数字计算机快速的算出(其算法称为快速傅里叶变换算法(FFT))。
图像傅里叶变换
图像的频率是表征图像中灰度变化剧烈程度的指标,是灰度在平面空间上的梯度。如:大面积的沙漠在图像中是一片灰度变化缓慢的区域,对应的频率值很低;而对于地表属性变换剧烈的边缘区域在图像中是一片灰度变化剧烈的区域,对应的频率值较高。傅里叶变换在实际中有非常明显的物理意义,设f是一个能量有限的模拟信号,则其傅里叶变换就表示f的谱。从纯粹的数学意义上看,傅里叶变换是将一个函数转换为一系列周期函数来处理的。从物理效果看,傅里叶变换是将图像从空间域转换到频率域,其逆变换是将图像从频率域转换到空间域。换句话说,傅里叶变换的物理意义是将图像的灰度分布函数变换为图像的频率分布函数,傅里叶逆变换是将图像的频率分布函数变换为灰度分布函数。
傅里叶变换以前,图像(未压缩的位图)是由对在连续空间(现实空间)上的采样得到一系列点的集合,我们习惯用一个二维矩阵表示空间上各点,则图像可由z=f(x,y)来表示。由于空间是三维的,图像是二维的,因此空间中物体在另一个维度上的关系就由梯度来表示,这样我们可以通过观察图像得知物体在三维空间中的对应关系。为什么要提梯度?因为实际上对图像进行二维傅里叶变换得到频谱图,就是图像梯度的分布图,当然频谱图上的各点与图像上各点并不存在一一对应的关系,即使在不移频的情况下也是没有。傅里叶频谱图上我们看到的明暗不一的亮点,实际像上某一点与邻域点差异的强弱,即梯度的大小,也即该点的频率的大小(可以这么理解,图像中的低频部分指低梯度的点,高频部分相反)。一般来讲,梯度大则该点的亮度强,否则该点亮度弱。这样通过观察傅里叶变换后的频谱图,也叫功率图,我们首先就可以看出,图像的能量分布,如果频谱图中暗的点数更多,那么实际图像是比较柔和的(因为各点与邻域差异都不大,梯度相对较小),反之,如果频谱图中亮的点数多,那么实际图像一定是尖锐的,边界分明且边界两边像素差异较大的。对频谱移频到原点以后,可以看出图像的频率分布是以原点为圆心,对称分布的。将频谱移频到圆心除了可以清晰地看出图像频率分布以外,还有一个好处,它可以分离出有周期性规律的干扰信号,比如正弦干扰,一副带有正弦干扰,移频到原点的频谱图上可以看出除了中心以外还存在以某一点为中心,对称分布的亮点集合,这个集合就是干扰噪音产生的,这时可以很直观的通过在该位置放置带阻滤波器消除干扰。
另外说明以下几点:
1、图像经过二维傅里叶变换后,其变换系数矩阵表明:
若变换矩阵Fn原点设在中心,其频谱能量集中分布在变换系数短阵的中心附近(图中阴影区)。若所用的二维傅里叶变换矩阵Fn的原点设在左上角,那么图像信号能量将集中在系数矩阵的四个角上。这是由二维傅里叶变换本身性质决定的。同时也表明一股图像能量集中低频区域。
2 、变换之后的图像在原点平移之前四角是低频,最亮,平移之后中间部分是低频,最亮,亮度大说明低频的能量大(幅角比较大)。
傅里叶变换的推广将其发展延伸,构造出了其他形式的积分变换:
从数学的角度理解积分变换就是通过积分运算,把一个函数变成另一个函数。也可以理解成是算内积,然后就变成一个函数向另一个函数的投影:



傅里叶变换
当然,选取什么样的核主要看你面对的问题有什么特征。不同问题的特征不同,就会对应特定的核函数。把核函数作为基函数。将现在的坐标投影到核空间里面去,问题就会得到简化。之所以叫核,是因为这是最核心的地方。为什么其他变换你都没怎么听说过而只熟悉傅里叶变换和拉普拉斯变换呢?因为复指数信号才是描述这个世界的特征函数!例子
一个关于实数离散傅里叶变换(Real DFT)实例
先来看一个变换实例,一个原始信号的长度是16,于是可以把这个信号分解9个余弦波和9个正弦波(一个长度为N的信号可以分解成

9个正弦信号:

正弦信号
9个余弦信号:

余弦信号

傅里叶变换
把以上所有信号相加即可得到原始信号,至于是怎么分别变换出9种不同频率信号的,我们先不急,先看看对于以上的变换结果,在程序中又是该怎么表示的,我们可以看看下面这个示例图:
傅里叶变换
中左边表示时域中的信号,右边是频域信号表示方法,从左向右表示正向转换(Forward DFT),从右向左表示逆向转换(Inverse DFT),用小写x表示信号在每个时间点上的幅度值数组,用大写X表示每种频率的幅度值数组,因为有
用Matlab进行傅里叶变换
FFT是离散傅里叶变换的快速算法,可以将一个信号变换到频域。有些信号在时域上是很难看出什么特征的,但是如果变换到频域之后,就很容易看出特征了。这就是很多信号分析采用FFT变换的原因。另外,FFT可以将一个信号的频谱提取出来,这在频谱分析方面也是经常用的。
FFT结果的具体物理意义。一个模拟信号,经过ADC采样之后,就变成了数字信号。采样定理告诉我们,采样频率要大于信号频率的两倍。
采样得到的数字信号,就可以做FFT变换了。N个采样点,经过FFT之后,就可以得到N个点的FFT结果。为了方便进行FFT运算,通常N取2的整数次方。
假设采样频率为Fs,信号频率F,采样点数为N。那么FFT之后结果就是一个为N点的复数。每一个点就对应着一个频率点。这个点的模值,就是该频率值下的幅度特性。具体跟原始信号的幅度有什么关系呢?假设原始信号的峰值为A,那么FFT的结果的每个点(除了第一个点直流分量之外)的模值就是A的




![]()
假设FFT之后某点n用复数








下面以一个实际的信号来做说明。假设我们有一个信号,它含有2V的直流分量,频率为50Hz、相位为-30度、幅度为3V的交流信号,以及一个频率为75Hz、相位为90度、幅度为1.5V的交流信号。用数学表达式就是如下:



傅里叶变换
从图中我们可以看到,在第1点、第51点、和第76点附近有比较大的值。我们分别将这三个点附近的数据拿上来细看:1点: 512+0i
2点: -2.6195E-14 - 1.4162E-13i
3点: -2.8586E-14 - 1.1898E-13i
50点:-6.2076E-13 - 2.1713E-12i
51点:332.55 - 192i
52点:-1.6707E-12 - 1.5241E-12i
75点:-2.2199E-13 -1.0076E-12i
76点:3.4315E-12 + 192i
77点:-3.0263E-14 +7.5609E-13i
很明显,1点、51点、76点的值都比较大,它附近的点值都很小,可以认为是0,即在那些频率点上的信号幅度为0。接着,我们来计算各点的幅度值。分别计算这三个点的模值,结果如下:
1点: 512
51点:384
76点:192
按照公式,可以计算出直流分量为:



然后再来计算相位信息。直流信号没有相位可言,不用管它。先计算50Hz信号的相位,




总结:
假设采样频率为Fs,采样点数为N,做FFT之后,某一点n(n从1开始)表示的频率为:


应用
尽管最初傅里叶分析是作为热过程的解析分析的工具,但是其思想方法仍然具有典型的还原论和分析主义的特征。"任意"的函数通过一定的分解,都能够表示为正弦函数的线性组合的形式,而正弦函数在物理上是被充分研究而相对简单的函数类,这一想法跟化学上的原子论想法何其相似!奇妙的是,现代数学发现傅里叶变换具有非常好的性质,使得它如此的好用和有用,让人不得不感叹造物的神奇:
- 傅里叶变换是线性算子,若赋予适当的范数,它还是酉算子;
- 傅里叶变换的逆变换容易求出,而且形式与正变换非常类似;
- 正弦基函数是微分运算的本征函数,从而使得线性微分方程的求解可以转化为常系数的代数方程的求解.在线性时不变的物理系统内,频率是个不变的性质,从而系统对于复杂激励的响应可以通过组合其对不同频率正弦信号的响应来获取;
- 著名的卷积定理指出:傅里叶变换可以化复杂的卷积运算为简单的乘积运算,从而提供了计算卷积的一种简单手段;
- 离散形式的傅里叶变换可以利用数字计算机快速的算出(其算法称为快速傅里叶变换算法(FFT)).
正是由于上述的良好性质,傅里叶变换在物理学、数论、组合数学、信号处理、概率、统计、密码学、声学、光学等领域都有着广泛的应用。
有关傅里叶变换的FPGA实现
傅里叶变换是数字信号处理中的基本操作,广泛应用于表述及分析离散时域信号领域。但由于其运算量与变换点数N的平方成正比关系,因此,在N较大时,直接应用DFT算法进行谱变换是不切合实际的。然而,快速傅里叶变换技术的出现使情况发生了根本性的变化。本文主要描述了采用FPGA来实现2k/4k/8k点FFT的设计方法。
整体结构一般情况下,N点的傅里叶变换对为:
其中,


式中,





由式(3)可知,8k傅里叶变换可由



图1中,RAM用来存储输入数据、运算过程中的中间结果以及运算完成后的数据,ROM用来存储旋转因子表。蝶形运算单元即为基2/4模块,控制模块可用于产生控制时序及地址信号,以控制中间运算过程及最后输出结果。
蝶形运算器基4和基2的信号流如图2所示。图中,若






而在基2蝶形中,Wk0和Wk2的值均为1,这样,将A,B,C和D的表达式代入图2中的基2运算的四个等式中,则有:




在上述式(4)~(11)中有很多类同项,如


以基4为例,在其运算单元中,实际上只需做三个复数乘法运算,即只须计算BWk1、CWk2和DWk3的值即可,这样在一个基4蝶形单元里面,最多只需要3个复数乘法器就可以了。在实际过程中,在不提高时钟频率下,只要将时序控制好?便可利用流水线(Pipeline)技术并只用一个复数乘法器就可完成这三个复数乘法,大大节省了硬件资源。
图2 基2和基4蝶形算法的信号流图
FFT的地址FFT变换后输出的结果通常为一特定的倒序。因此,几级变换后对地址的控制必须准确无误。
倒序的规律是和分解的方式密切相关的,以基8为例,其基本倒序规则如下:
基8可以用




更进一步,对于基16的变换,可由




在

N点傅里叶变换的旋转因子有着明显的周期性和对称性。其周期性表现为:
FFT之所以可使运算效率得到提高,就是利用了对称性和周期性把长序列的DFT逐级分解成几个序列的DFT,并最终以短点数变换来实现长点数变换。
根据旋转因子的对称性和周期性,在利用ROM存储旋转因子时,可以只存储旋转因子表的一部分,而在读出时增加读出地址及符号的控制,这样可以正确实现FFT。因此,充分利用旋转因子的性质,可节省70%以上存储单元。
实际上,由于旋转因子可分解为正、余弦函数的组合,故ROM中存的值为正、余弦函数值的组合。对2k/4k/8k的傅里叶变换来说,只是对一个周期进行不同的分割。由于8k变换的旋转因子包括了2k/4k的所有因子,因此,实现时只要对读ROM的地址进行控制,即可实现2k/4k/8k变换的通用。
存储器控制因FFT是为时序电路而设计的,因此,控制信号要包括时序的控制信号及存储器的读写地址,并产生各种辅助的指示信号。同时在计算模块的内部,为保证高速,所有的乘法器都须始终保持较高的利用率。这意味着在每一个时钟来临时都要向这些单元输入新的操作数,而这一切都需要控制信号的紧密配合。
为了实现FFT的流形运算,在运算的同时,存储器也要接收数据。这可以采用乒乓RAM的方法来完成。这种方式决定了实现FFT运算的最大时间。对于4k操作,其接收时间为4096个数据周期,这样FFT的最大运算时间就是4096个数据周期。另外,由于输入数据是以一定的时钟为周期依次输入的,故在进行内部运算时,可以用较高的内部时钟进行运算,然后再存入RAM依次输出。
为节省资源,可对存储数据RAM采用原址读出原址写入的方法,即在进行下一级变换的同时,首先应将结果回写到读出数据的RAM存贮器中;而对于ROM,则应采用与运算的数据相对应的方法来读出存储器中旋转因子的值。
在2k/4k/8k傅里叶变换中,要实现通用性,控制器是最主要的模块。2k、4k、8k变换具有不同的内部运算时间和存储器地址,在设计中,针对不同的点数应设计不同的存储器存取地址,同时,在完成变换后,还要对开始输出有用信号的时刻进行指示。
傅里叶变换相关的文章

电影《被嫌弃的松子的一生》(日语:嫌われ松子の一生)改编自山田宗树所著同名小说,由中岛哲也编剧、导演,石田雄治、佐谷秀美、间濑泰宏、小玉圭太等主演,于2006年5月27日在日本首映。
1917年俄国革命是1917年于俄国发生的一系列革命运动的统称,这些运动最终灭亡了俄罗斯帝国并建立了苏维埃俄国。在1917年3月(儒略历2月)的二月革命使得罗曼诺夫王朝被推翻,临时政府掌权。同年11月(儒略历10月)的十月革命使得临时政府遭推翻,被布尔什维克(苏维埃)政府取代。
吉尔吉特-巴尔蒂斯坦(乌尔都语:شمالی علاقے,藏语:གིལྒིཏ་བལྟིསྟན),过去称北部地区(شمالی علاقہ جات),当地民族主义分子称为بلاوارستان,位于巴基斯坦控制的克什米尔的北部,是巴基斯坦最北的地区。面积72,496平方公里,2006年人口1,126,
章和是东汉章帝刘炟的第三个年号,也是他的最后一个年号,共计18个月。该年号在历史上被用作几个政权的年号。据《资治通鉴》记载,元和四年七月廿七壬戌(87年9月12日),章和正式改元。在章和二年二月,汉和帝即位时沿用该年号,但次年正月初一(89年1月30日)改元永元。
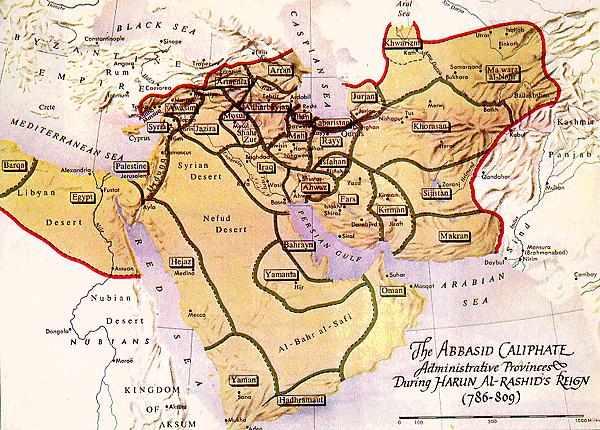
哈伦·拉希德(Harun Rashid,约764~809) 阿拉伯帝国阿拔斯王朝最著名的哈里发,因与法兰克的查理曼大帝结盟而蜚声西方,更因世界名著《一千零一夜》生动地渲染了他的许多奇闻轶事而为众人所知。在他统治的23年间,国势强盛,经济繁荣,文化发达,首都巴格达成了阿拉伯帝国的政治、经济、文化中心和文人学士的荟萃之地。

尚可名片
这家伙太懒了,什么都没写!
作者