
空速管也叫皮托管、总压管、总-静压管。它是感受气流的总压(也称全压)和静压,并将测得的压力数据传送给大气数据计算机、飞行仪表的装置。[1] 空速管这种航空装置主要是用来测量飞行速度的,同时还兼具其它多种功能。 英文是Pitot tube。皮托管是测量气流总压和静压以确定气流速度的一种管状装置,由法国H.皮托发明而得名。严格地说,皮托管仅测量气流总压,又名总压管;同时测量总压、静压的才称风速管,但习惯上多把风速管称作皮托管。
精选百科
本文由作者推荐

空速管
用来测量飞行速度的装置
中文名
空速管
外文名
airspeed head
别名
皮托管、总压管、总-静压管
作用
感受气流的总压和静压
主要作用
测量飞行速度的
领域
航空航天
简介

空速管也叫皮托管,总压管。风向标,也叫气流方向传感器或流向角感应器,与精密电位计(或同步机或解析器)连接在一起,提供出一个表示相对于大气数据桁架纵轴的空气流方向的电信号。
空速管是飞机上极为重要的测量工具。它的安装位置一定要在飞机外面气流较少受到飞机影响的区域,一般在机头正前方,垂尾或翼尖前方。
飞机在亚声速飞行时,空气因受机体的扰动作用,在其周围形成了一个飞机绕流场,而空速管探测到的气流静压实际上是飞机绕流场中的静压,它比当地实际大气静压高,也就是测得的压力系数是正值,它取决于空速管的位置误差。
同时为了保险起见,一架飞机通常安装2套以上空速管。有的飞机在机身两侧有2根小的空速管。美国隐身战斗机F-117在机头最前方安装了4根全向大气数据探管,因此该机不但可以测大气动压、静压,而且还可以测量飞机的侧滑角和迎角。有的飞机上的空速管外侧还装有几片小叶片,也可以起到类似作用;垂直安装的用来测量飞机侧滑角,水平安装的叶片可测量飞机迎角。为了防止结冰,空速管被加温――对探头进行加温防冰可以防止结冰堵塞测量孔,影响探测精度。为了防止动/静压系统积聚水分,在空速管设有排水孔和动/静压系统管路设有排水接头。
相关原理
它由两个同心圆管组成,内圆管为总压管,外套管为静压管。空速管测量飞机速度的原理是这样的

测量速度
空速管测量出来的速度并非是飞机真正相对于地面的速度,而只是相对于大气的速度,所以称为空速。如果有风,飞机相对地面的速度(称地速)还应加上风速(顺风飞行)或减去风速(逆风飞行)。另外空速管测速原理利用到动压,而动压和大气密度有关。同样的相对气流速度,如果大气密度低,动压便小,空速表中的膜盒变形就小,所以相同的空速,在高空指示值比在低空校这种空速一般称为"表速"。现代的空速表上都有两根指针,一根比较细,一根比较宽。宽的指针指示"表速",而细的一根指示的是经过各种修正的相当于地面大气压力时的空速,称为"实速"。
为了防止空速管前端小孔在飞行中结冰堵塞,一般飞机上的空速管都有电加温装置。
总之,空速管是飞机上极为重要的测量工具。只有细心地做好维护工作,才能有效地保证动静压的探测精度,使得其寿命长久一些;只有对动静压探头认真检查,才能保障每一个航班飞行安全。
其他
现代的空速管除了正前方开孔外,还在管的四周开有很多小孔,并用另一根管子通到空速表内来测量静止大气压力,这一压力称静压。空速表内膜盒的变形大小就是由膜盒外的静压与膜盒内动压的差别决定的。
气压式高度表空速管测量出来的静压还可以用来作为高度表的计算参数。如果膜盒完全密封,里面的压力始终保持相当于地面空气的压力。这样当飞机飞到空中,高度增加,空速管测得的静压下降,膜盒便会鼓起来,测量膜盒的变形即可测得飞机高度。这种高度表称为气压式高度表。
升降速度表利用空速管测得的静压还可以制成"升降速度表",即测量飞机高度变化快慢(爬升率)。表内也有一个膜盒,不过膜盒内的压力不是根据空速管测得的动压而是通过专门一根在出口处开有一小孔的管子测得的。这根管子上的小孔大小是特别设计的,用来限制膜盒内气压变化的快慢。如果飞机上升很快,膜盒内的气压受小孔的制约不能很快下降,而膜盒外的气压由于有直通空速管上的静压孔,可以很快达到相当于外面大气的压力,于是膜盒鼓起来。测量膜盒的变形大小即可算出飞机上升的快慢。飞机下降时,情况正相反。膜盒外压力急速增加,而膜盒内的气压只能缓慢升高,于是膜盒下陷,带动指针,显示负爬升率,即下降速率。飞机平飞后,膜盒内外气压逐渐相等,膜盒恢复正常形状,升降速度表指示为零。
取消与代替
取消空速管是飞机重要的大气数据传感器,其利用皮托管原理来精确测量飞行时的大气总压和静压,数据计算机再通过伯努利全静压方程等计算式来换算得飞行控制所需的飞行速度、升降速度和大气压力等数据。空速管在使用中要受到气流干扰,空速管的长度越大,前端测压口与机体的距离越远,所测量的静压就越接近大气的真实静压。因此,为提高测量精度,准确测量总压、静压,空速管轴向应尽量与气流方向平行,空速管的最佳安装位置就是在与机身轴线相同的机头前方,数据计算机的误差修正精度、换算得的数据更容易保证。在我军装备的战斗机中,采用机头进气方式的歼-6/7的空速管是安装在机头下,可以设置相当长的探杆,缺点是结构重量过大,对地面活动的影响也比较多;歼-7将空速管缩短后移到机头侧面;歼-8II和歼轰7则采用较短的机头锥空速管;苏-27/歼-11和歼-10也是机头雷达罩前空速管,只不过利用安装位置优势缩短空速管长度。在2014年亮相的歼-10B和JF-17上则是进一步取消了机头空速管,这一特点也在国外多型战斗机的新升级改型中出现。
取消了安装在机头雷达罩上的空速管,一定程度上了降低了这一机载雷达天线前方不透波结构对雷达工作的影响。但实际上,无论是从最早的圆锥扫描和单脉冲雷达,还是主力的平板缝隙PD雷达,再到最先进的AESA相控阵天线,机头空速管所产生的影响和问题都是一样的,也是一直存在的。机载雷达的雷达波扫描到了绝缘的天线罩上的金属结构时,金属反射回的雷达波会干扰雷达的正常工作,所以要采用泡沫结构的金属吸波材料来遮挡,吸收消耗照射到金属部件位置上的雷达波束,来削弱雷达罩内的反射信号。但在雷达罩上的金属部件可不只是已经可以取消的空速管,还有必需的防雷击分流条。全天候各类复杂恶劣气象条件下飞行的战斗机,遭遇雷击时,其雷达罩如果没有分流条这一放电措施,就很容易破坏雷达罩结构和内部的雷达系统。所以说,
取消雷达罩中心位上的机头空速管,对机载雷达的益处可能并不会是理所当然的那么突出。
其实机头空速管的取消,最为直接体现的好处就是雷达罩的结构设计难度的降低。飞行时空速管受到压力和弯矩影响时,刚性管体的应力会传到复合材料的天线罩上,对作为基座的雷达罩的位置精度和受力不利,特别是在战斗机高速机动时的影响更为明显,结构上的弹性变形会影响到空速管的测量效果。所以,机头空速管对雷达罩尖端连接位置的材料强度要求和结构重量都很高较大,不利于根据雷达技术合理化设计雷达罩的结构。机头空速管的取消,从而使机载雷达罩的结构设计摆脱了空速管的桎梏,结构设计、加工工艺上将更为自由,可完全按照雷达信号的有利特点来确定雷达罩的层数、罩体厚度、铺叠方式和纤维方向,获得结构强度与重量和雷达波透射性能间平衡的有利结构。
最后,再从飞行气动上来看,飞机机头顶着的这个大长杆,在与周围大气相互作用形成的激波干扰将影响飞行器的气动性能;特别是在大迎角飞行状态时,其是引起头部涡流及侧向不稳定的因素之一,导致操控品质的下降;还有就是作为突出于飞行器正向表面的部件也影响到了飞行器的隐身性能。
所以从70年代开始,国外的战斗机转而采用机身空速管设计。虽然在数据采集的精度上,机身空速管要差于最佳位置上的机头空速管,但通过对称设置多个L型空速管,利用大气数据计算机更强的数据处理和修正程序的误差补偿,也可保证测量的精度。机身空速管的更为轻便,安装位置更为灵活,但前提是通过风洞测试和试飞所取得的充足大量的气动数据,测量出数据误差与速度、攻角、侧滑角的关系曲线,才能通过大气数据计算机的修正程序,对空速管测量的静压数据进行补偿和修正。所以我们看到国内外的诸多机型,在原型机试飞阶段、气动数据积累的早期阶段还是都要在“头顶”安装测量精度高的机头空速管,只是在大量的试飞测试中获得了足够充足准确的气动数据和可靠的修正系数,数据计算机的修正程序可以支撑起数据的修正补偿后,机头进气管才会在量产机型中取消。转而使用机头侧面小巧的机身进气管或者像F-35、歼-20那般,采用嵌入式大气数据传感技术。所以2013号歼-20的机头空速管的取消
标志着歼-20试飞工作进入了又一新阶段。
尽管空速管技术是目前最成熟、应用最为广泛的大气数据测量技术,空速管直到现在仍然是飞机空速测量的重要手段。但远期来看随着航空航天技术的发展,新技术的出现以及新飞行器特殊的飞行要求等综合因素下,传统的空速管的新问题和无法满足新需要开始凸显。特别是,在当下几个主要军事强国争相发展的高超音速飞行器领域,空速管的上述问题更为突出。不仅是高超声速飞行状态时,空速管所产生的激波将干扰飞行器的整体气动特性,不利于对飞行器的攻角、侧滑角等实现精确控制,而且高超音速飞行所产生的气动热更是很可能将传统的空速管烧蚀。
代替在60年代,美国国家航空航天局为了满足航天飞机进入大气层时的大气数据测量需求,提出了融于飞行器表面流线的大气数据传感器技术。这种技术依靠嵌入在飞行器前端或机翼的压力传感器阵列来测量飞行器表面的压力分布,并由压力分布间接获得飞行参数的数据传感系统,这就是嵌入式大气数据传感系统(Flush Air Data Sensing FADS)。
美国在60年代开始了对嵌入式大气数据传感系统的研究。在90年代初期,美国开始应用于超声速战斗机的试验研究上,当时主要目的是解决战斗机大攻角机动时的大气数据测量问题。90年代中期时嵌入式大气数据传感系统应用在了X-33上,整个系统算法的稳定性基本得到解决。此后,又集中在嵌入式大气数据传感系统的算法执行性、故障检测与排除、误差分析与校准等问题上。直到嵌入式大气数据传感系统的日趋成熟在F-35上的应用。以及我国的歼-20在完成早期试验阶段相关测试的大量数据收集工作后取消机头的空速管,也由机头侧面的嵌入式大气数据传感系统代替。因此可以说,歼-20原型机的各种参数和状态已经趋于稳定,进一步接近服役的标准。那么,嵌入式大气数据传感系统在追求高机动性、超音速巡航能力的新一代隐身战机中的应用,也侧面表明其将成为未来大气数据传感技术未来的发展方向。
嵌入式大气数据传感系统可测量包括动压、静压、迎角、侧滑角等飞行参数。由于嵌入式大气数据传感系统无需传统机械装置,只需将压力转化为电信号,系统更易于集成化、小型化;压力感受装置是内嵌于飞行器内与飞行器表面平齐,因此不会影响气动外形,适用于大马赫数、大迎角飞行状态下大气数据的精确测量,也便于气动外形上的隐形。同时,嵌入式大气数据传感系统在硬件和软件上的冗余容错能力,使其在可靠性、稳定性、精度和适应范围上都具有优势。另外,由于嵌入式大气数据传感系统的压力传感器一般置于机体内,这使其更能适应未来高超声速飞行器的恶劣严苛的飞行环境。
技术上,嵌入式大气数据传感系统主要由压力点(嵌入安装的取气装置)、引气管路、压力传感器及总温传感器组件(传感器及信号处理单元)、数据预处理单元、软件算法及相关连接器与数据电缆等组成。系统在工作时,绕特定气动外形流动的气流,被嵌入安装的微小取气装置探测到,并通过引气管路将各路压力信号传给高精度压力传感器,由各传感器实现不同位置压力测量,最后通过特定算法解算出大气参数。同时,系统可设计总温传感器、辅助修正单元等,用于测量大气总温,动态角度,从而进行非标准大气模型下的高程修正、角度修正补偿等。理论上,压力点至少要布置4个以上才能测量出飞行器的攻角、侧滑角、动压和静压这个四个基本大气参数。多个测压点的冗余又可进一步提高测量精度和可靠性,但压力点的增多也在增加系统的复杂程度,对整个系统的动态特性和稳定又是不利的。
参考资料
相关视频
1.空速管是个什么玩意儿 · 行知部落(引用日期:2021-07-06)
空速管相关的文章

斯图加特(德语:Stuttgart或译:斯图嘉特)位于德国西南部的巴登-符腾堡州中部内卡河谷地,靠近黑森林。不仅是该州的州首府,也是州级行政区及斯图加特地区首府和该州的第一大城市。同时也是该州的政治中心:巴符州议会、州政府,和众多的州政府机关部门均设在这里。由于其在经济、文化和行政方面的重要性,是德
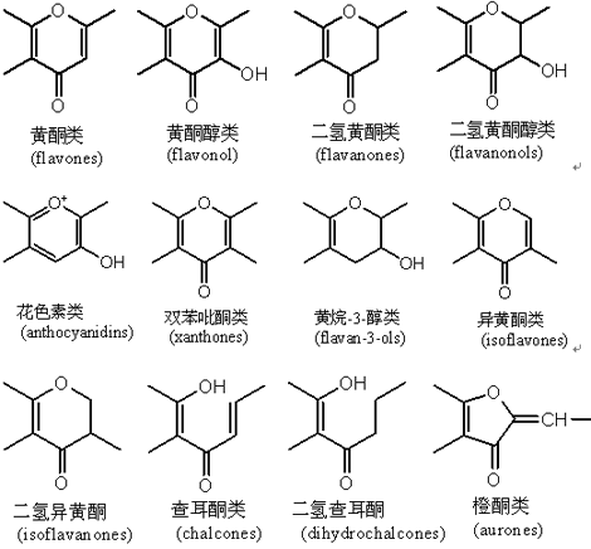
黄酮黄酮类化合物的总称黄酮(flavone),是黄酮类化合物的总称,泛指两个具有酚羟基的苯环(A-与B-环)通过中央三碳原子相互连结而成的一系列化合物。黄酮类化合物结构中常连接有酚羟基、甲氧基、甲基、异戊烯基等官能团。黄酮类化合物(英语:Flavonoid,又称类黄酮)是指基本母核为2-苯基色原酮类化合物,现在则泛指两个具有酚羟基的苯环通过中央三碳原子相互连接的一系列化合物。他们来自于水果、蔬菜、


《亲爱的柠檬精先生2》是由导演王启蘅执导,陈姝君、陈品延、蔡祥宇、孙晓伦、奇凌等主演的一部电视剧。[1]2022年7月22日起,《亲爱的柠檬精先生2》在优酷全网独播。[5]

尚可名片
这家伙太懒了,什么都没写!
作者

