电动机本体
电动机本体由定子和转子两部分构成。
定子:定子部分是电动机的电枢,其上开有齿槽,齿槽数取决于转子的极数和相数,是它们的整数倍。在定子的铁芯中缠绕着对称的多相绕组(绕组的相数并不固定,一般都是三相或四相,也可以是二相或五相),绕组可以接成星形或角形,各相绕组分别与逆变器中各开关管相连接。
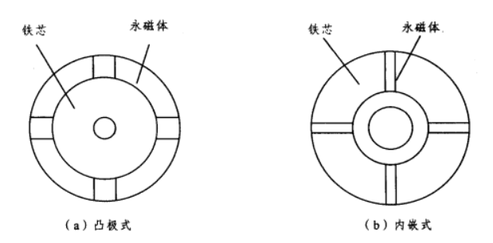
转子:转子的主要部分是具有一定磁极对数的永磁体,由永磁材料制成,作用是在电动机的气隙中建立一定强度的磁场。转子的结构可以采用凸极式或者内嵌式,具体可如下图所示。
凸极式(外装式):在转子的外表面贴上扇形的永磁体,即为凸极式转子,其主要优点是电枢电感小,齿槽效应转矩小,但同时也存在一定的缺点:气隙磁通密度低、磁通不集中且易受电枢反应影响,因此凸极式转子常见于小容量的低速电机。 内嵌式(内装式):在转子的铁芯中嵌入矩形的永磁体,即为内嵌式转子,与凸极式转子相对,其主要优点是气隙磁通密度大、磁通集中且不易受电枢反应影响,但也存在着电枢电感大,齿槽效应转矩大的缺点,因此内嵌式转子常见于大容量的高速电机。
转子位置传感器
转子位置传感器的主要作用是检测转子磁极相对于定子电枢绕组轴线的位置,从而提供给逆变电路正确的换相信息,通过将转子磁钢磁极的位置信号转换成电信号传递给电机控制器,电机控制器根据得到的位置信息控制定子绕组换相,保证电动机定子绕组中的电流根据转子位置的变化按次序换相,从而在电动机气隙中形成步进式的旋转磁场,驱动永磁转子持续不断地旋转。
无刷直流电动机中常用的转子位置传感器主要包括霍尔式位置传感器、电磁式位置传感器、磁敏式位置传感器和光电式位置传感器。其中霍尔式位置传感器以其结构简单、成本低、体积小不占据空间、易于安装、易于机电一体化等优点,占据着越来越大的市场。
转子转速传感器
为了通过转速电流双闭环系统控制无刷电机,可以将增式光电脉冲编码器安装在转子上来获取无刷电机中转子的转速,测量转子转速的方法有 M 法、T法、M/T 法以及锁相法。
工作原理
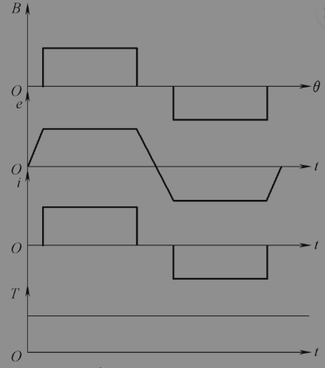
直流无刷电机利用方波电流进行驱动控制,在方波电流作用下,逆变器功率管根据方波的高和低来实现导通或者关断,使电动机定子电枢产生按60°电角度持续前进的磁场,从而带动永磁转子的旋转。下图给出了方波控制电流以及对应的磁通密度分布、相反电动势和电磁转矩波形。
理想情况下方波驱动的磁通密度分布、相反电动势、相电流和电磁转矩波形
最常见的工作方式为三相桥式六状态的工作方式,在360°(电气角)的一个电气周期内,三相绕组有六个导通状态,据此可以划分为六个区间。三相绕组的三个端连接在由六个大功率开关器件组成的三相桥式逆变器的三个桥臂上,绕组为星形接法时,在任意时刻,三相绕组中都一定有且只有两个绕组串联导电,其中一相为正向导通,另一相为反向导通。取任意一相绕组,其在一个电气周期内,正向导通、反向导通、不导通各占三分之一。
某一相绕组正向导通产生转矩:当电机转子恒速转动,电流为恒值时,由控制器电流环作用强迫该相电流为某一恒值。在理想情况下,无刷电机的气隙磁通密度分布促使每相绕组的反电动势波形为有平坦顶部的梯形波,梯形波的上顶角度接近120°,如右图所示。在转子位置传感器作用下,该相电流导通120°范围和同相绕组反电动势波形平坦部分120°范围在相位上是完全重合的。从而保证了在该相电流导通时产生的电磁功率和电磁转矩保持为恒值。根据每相绕组正向导通和反向导通的对称性以及三相绕组的对称性,总合成的电磁转矩也为恒值,不随转角位置而变。在一相绕组正向导通120°范围内,输入相电流I为恒值,它的一相绕组反电动势E为恒值,转子角速度为Ω,其产生的电磁转矩可由下式表示: 考虑在一个电气周期内该相还反向导通120°,以及三相电磁转矩的叠加,则在一个360°电气周期范围内的总电磁转矩T为:
在上述理想情况下,方波驱动无刷电机转矩与电流存在着线性关系,在理论上不会出现转矩波动。但是,在实际应用中,由于每相反电动势梯形波平顶部分的宽度很难达到120°,平顶部分也不会是绝对的平坦无纹波,加上齿槽效应的存在、换相过渡过程的电感作用以及电流波形不是等原因,存在着一定的转矩波动。
控制概述
控制电路组成
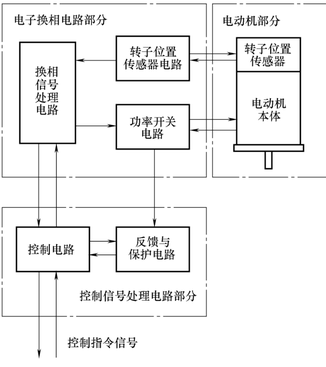
无刷直流电动机基本控制结构框图如下图所示。无刷直流电动机必须配以电子控制器才能实现绕组的电子换相。无刷电机的控制电路包括电子换相电路部分、电动机部分以及控制信号处理电路部分,其中电子换相电路部分由换相信号处理电路、转子位置传感器电路和功率开关电路组成。
转子位置传感器电路:位置传感器电路为位置传感器提供激励,包括为光电传感器、霍尔传感器提供稳定的低压直流电源,为电磁式传感器提供高频交流激励电源等。
位置传感器电路不仅要接收位置传感器的输出信号,还要对其进行放大、整形处理才能得到矩形波信号,发送给控制电路。对于无位置传感器控制方式,则需要单独从电动机取得某种信息,并通过特定的电路和软件来计算获得转子的位置信息。
换相信号处理电路:换相信号处理电路通过对位置传感器信号和控制信号进行综合运算和逻辑处理,来获得对各相绕组的导通顺序以及合适的导通角度的逻辑信号,提供给功率开关电路。
功率开关电路:功率开关电路由逆变桥电路、功率开关的栅极(或基极、门极)驱动电路、续流电路和吸收电路等组成。通过由功率开关器件(如GTR、MOSFET、IGBT或功率模块)组成的桥式逆变电路或非桥式开关电路连接电动机的三相绕组,以接通或断开相绕组,实现各相绕组的正确换相以及完成控制指令。功率开关电路绝大多数按开关方式工作。仅在小功率无刷直流电动机的个别例子中,其功率晶体管处于放大工作状态。
开环、闭环控制
无刷直流电动机可以采用开环控制系统或者闭环控制系统。
开环控制:开环控制系统相对比较简单,仅通过转子位置传感器来获取转子的位置信息,从而保证转子位置与电动机换相同步。电动机的转速和电流由取决于电动机的以及所驱动负载的机械特性。当电压或着负载出现波动时,电动机的转速也会发生一定的波动,不能通过控制使其保持稳定。
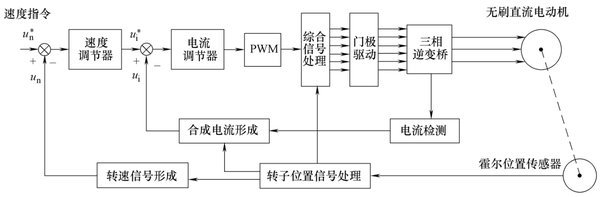
闭环控制:常见的转速电流双闭环控制系统可以通过监测转子转速、和相电流的反馈信息来调节控制电流,从而获得更好的控制效果和更完善的控制功能,实现一定程度的稳速或调速控制。其原理框图如下图所示。
该系统的工作原理:外部会给定控制系统一个电机的目标速度值,即系统的控制目标,转子位置传感器电路对测得的转子位置信息进行处理获得转子的当前转速,目标速度值与速度反馈值存在一定的差异,两者相减会得到速度差值,通过速度调节器可以进行PI(比例和积分)调节,从而输出电流环的给定值(基于目标速度的目标电流),同理与电流传感器得到的电流反馈值进行比较得到电流差值,电流差值再通过电流调节器进行调节,输出的调节信号在PWM电路中变换成相应的PWM的脉冲宽度,然后综合转子位置信号产生所需的各相PWM控制信号。该PWM控制信号送至基极(或栅极、门极)驱动电路,驱动三相逆变桥电路,使相应的功率开关器件工作,通过合适的PWM占空比来驱动电动机绕组。 此外,转速电流双闭环控制系统还会利用转子位置反馈信息将电流传感器信号进行采样,形成一个代表电动机转矩的合成电流信号,并使相反电动势和相电流的相位始终保持一致。 双闭环控制系统可以保证电动机在电压、负载变化或外界噪音扰动的情况下,系统自动的进行调整,使其转速能够时刻与目标转速保持一致。
应用领域
办公计算机外围设备、电子数码消费品
无刷直流电机的体积小,功率密度高,使其广泛应用于日常办公用机器(打印机、传真机、复印机)以及电子数码消费品(硬盘驱动器、软盘驱动器、电影摄影机、磁带记录仪)中。 工业控制领域
无刷直流电机的效率高、过载能力强,在拖动系统中展现出了优异的性能,同时在纺织、冶金、印刷、自动化生产流水线、数控机床等工业生产方面,无刷直流电机都有涉猎。
医疗设备领域
无刷直流电机无机械换向器,采用全封闭式结构,可以防止尘土进入电机内部,可靠性高。用来驱动人工心脏中的小型血泵、手术用高速器具的高速离心机、热像仪和测温仪的红外激光调制器都使用了无刷直流电机。
汽车领域
随着汽车行业向着节能环保的方向发展,新能源汽车中所使用的电机也必须满足高效率、低能耗的标准。无刷直流电机的低噪声、寿命长、无火花干扰、方便集中控制等优点完全符合汽车中应用的要求,除了用于驱动电车的电机外,无刷直流电机在雨刷器、电动车门、汽车空调、电动车窗等部位都有应用。