
闭合差指某个量的观测结果与其应有值之间的差值,在某几个量构成几何或物理条件方程的情况下,由于这些量的观测值中包含有误差,它们不能满足方程而产生一定的差值,称此差值为条件闭合差,简称闭合差。
精选百科
本文由作者推荐
闭合差
观测结果与其应有值之间的差值
中文名
闭合差
外文名
closing error
释文
测量平差中常用的一个术语
学科
测绘科学与技术
定义
观测结果与其应有值之间的差值
概念信息
闭合差是指在我国西部特殊的地表条件,使相交测线处常出现速度不闭合现象,明显地降低了速度场的精度。研究在分析相交测线速度不闭合原因的基础上,考虑速度在纵向上可分为数段,而每一段内速度变化规律在测线交点处应是相同的,对于平均速度近似呈线性关系,故提出采用多段折线最优逼近平均速度的方法,每段对应一套地层,在每段内求出相应的时间闭合差,采用科学的方法进行校正,解决相交测线处速度闭合问题。实际应用结果表明,方法是有效的。
水准网介绍
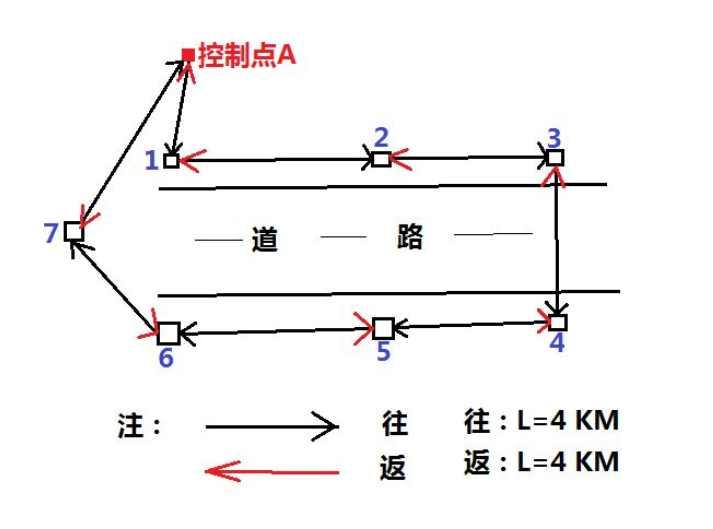
研究背景水准网平差的目的在于依据最小二乘原理,消除观测值之间的矛盾和不符,进而求出点的最后高程及评定精度。而在水准网平差之前检查水准网的闭合差是否超限,是检查水准测量外业观测成果质量的主要依据。在计算闭合差之前,首先要确定独立的闭合环或附合路线。独立闭合环或附合路线可由人工方式确定,这种方式虽直观灵活,但容易出错,使所找的闭合环或附合路线不完全或不独立,也不便于水准测量数据处理过程的自动化。
随着水准网形复杂程度的增加,水准网中独立闭合环或附合路线的自动生成便成为一个亟待解决的问题。适用于编程的方法一般都是采用图论的方法来进行闭合环的搜索,主要有3种常用闭合环搜索方法:基于邻接矩阵变换的闭合环搜索法;基于生成树和余树变换的闭合环搜索法;基于深度优先搜索的闭合环搜索法。上述方法虽能解决问题,但算法结构复杂,编程比较困难,并且要将闭合环和附合路线分别讨论来进行搜索,再利用搜索出来的结果来解算闭合差。
为了克服以上问题,并且充分利用水准网平差中的信息,将间接平差函数模型转化为条件平差函数模型,利用条件方程式中的所有信息,搜索出独立闭合环或附合路线并快速解算出闭合差。利用这种方法,独立闭合环或附合路线可同步搜索出来,同时闭合差的结果也同步给出来,完全克服了上述问题。
间接平差向条件平差的转化原理
图1 闭合差解算流程图
由于水准网间接平差函数模型是线性形式,所以无需根据已知条件求出 未知点高程的近似值,直接将未知点高程作为参数向量列立误差方程式即可。可以看出,其误差方程的形式比较统一,具有一定的规律性,容易实现计算机编程解算,但函数模型中不包含有独立闭合环或附合路线的任何信息。条件平差受网形、观测值的种类和数量的影响,极难实现任意网的编程解算,但对于水准网来说,独立闭合环或附合路线的全部信息已包含在条件平差数学模型中。通过对照间接平差与条件平差函数模型,可发现建立条件平差数学模型的一种简单易行的方法。对照两种平差模型,平差准则与随机模型完全一样,只是间接平差的函数模型多了一项未知参数X,如果能够通过一定的变换消去这项未知参数,即可得到对应的条件平差函数模型。随着所采用的消元法不同,独立闭合环或附合路线的组合并不单一,但不管哪一种组合都是等价的,这也可说明条件方程式的列立并不单一,一个条件信息只决定一个条件方程。独立闭合环或附合路线的闭合差自动计算出来后,与限差进行比较,就可以判断组成该闭合环或附合路线的观测值是否含有粗差,即闭合差超过限差则认为观测值含粗差,否则没有粗差。以上算法可通过编程自动实现,闭合差解算的流程图如图1所示。
研究结论闭合差作为水准测量外业质量检查的主要依据,通过将间接平差函数模型转化为条件平差函数模型,可完全实现独立闭合环或附合路线自动搜索及闭合差自动解算的功能,同时借助于闭合差可寻找观测值中可能存在的粗差,经过编程及实例验证,证明该方法具有一定的严密性和通用性,从而为闭合差计算程序的改进和闭合环粗差定位提供了一种新的方法。此种方法不仅适用于水准网闭合差的解算,预计也能较好地运用于平面网及GPS网闭合环的搜索及解算问题。
校正方法
我国西部地表主要为沙漠、砾石覆盖区,由于高程变化大、地表条件复杂、表层速度变化明显等特点,导致相交测线处速度不闭合,从而使速度场的精度降低。这个问题还没有得到有效的解决。我们对此进行了初步研究,通过分析认为,在相交测线处产生速度闭合差的原因主要有如下几点:
(1)静校正不彻底造成的误差。
(2)施工年度不同,地表高度及潜水面发生变化,导致地震波的传播时间发生变化。
(3)不同的覆盖次数、不同的检波器组合及不同的排列长度等产生的误差。
(4)震源不同产生的误差。
尽管每一种原因产生的误差可能较小,但多种误差累加起来,就会产生较严重的闭合差。为了建立精度较高的速度场,以便更精确地了解地下构造,落实小幅度构造的位置,提供精确的钻探井位,很有必要对相交测线处速度闭合差问题进行深入的研究。在速度谱解释中,不同人对同一速度谱的解释会有所不同,但对于那些强反射能量团的拾取却是一致的,这是因为强能量团特征明显,从而使速度谱曲线的形状也就大致确定下来。但对于原始资料质量较差,无强反射能量团的速度谱或时间段,不同人解释的速度谱曲线的形状差异可能较大。
强反射层对应速度谱的强能量团,尽管这类能量团特征明显,但在横向上,t时间及速度谱速度却是跳动的(实际地层情况并非如此),使速度谱上的强能量团难以追踪下去。也就是说,不同CDP点速度谱的分层不能达到一致(这主要是因为在速度谱计算中,t时间与速度扫描不是连续的,有步长、静校正、地震数据的信噪比较低等影响)。由此计算的层速度及平均速度也存在类似的问题,因而测线交点闭合不能采用从剩余静校正中选一个标准层的方法来解决,需另辟捷径。
用人机联作的方法对塔里木盆地主要测线近100万个速度数据作了综合分析,发现该盆地在纵向上根据速度可分为四套地层:T8(新生界的底)以上为新生界构造层,T8-Tg(中生界的底)为中生界构造层,Tg-Tg4(泥盆系的底)为上古生界构造层,Tg4-Tg8(震旦系的底)为下古生界构造层。总结盆地内各地区的速度纵向变化规律,得到四种结构类型,其中Tg5′为奥陶系内部下奥陶统顶界的反射。因叠加速度存在地层倾角及测线与地层倾向夹角的影响,故将叠加速度用模型迭代法转换为平均速度来讨论其闭合问题。考虑到速度纵向可分为数段,而每一段内速度变化规律在测线交点处应是相同的。对于平均速度近似呈线性关系,此处采用多段折线最优逼近平均速度的方法,每段对应一套地层,各分段点大致对应各套地层的分界线,在每段内求出相应的时间闭合差,采用科学的方法进行校正,解决相交测线处速度闭合问题。
多段折线最优逼近的数学原理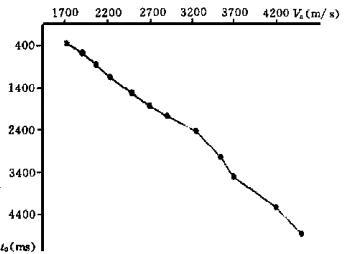
图2速度曲线
为了从速度曲线上定出各套地层分界点,常用方法是先画出速度 曲线图,凭直观定出分段点。这种作法虽然总体上是正确的,但存在如下问题:①分段点的选取缺乏客观标准;②费时费工,极不方便。因此,寻求一种客观、严格、科学、自动确定速度曲线分段点的方法是亟待解决的问题。此处提出的多段折线最优逼近方法是自动确定速度曲线分段点的一种有效的科学方法,它在实验数据处理中也有着广阔的应用前景。计算校正方法及应用例子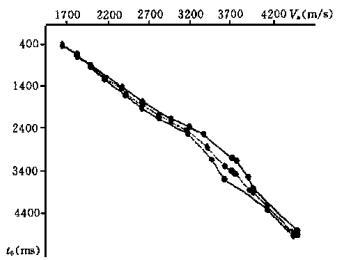
图3测线交点速度曲线及其校正结果(中间曲线)
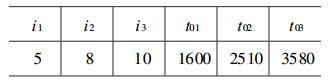
表1 速度曲线分段点表
采用上述方法确定速度曲线分段点后,对相交测线交点上两条速度 曲线的同一段,计算其平均时差作为该段闭合差。考虑到此二速度曲线的可靠程度可能不一样,为使可靠性高的速度曲线起的作用大,我们选取交点处同一测线上相邻速度曲线上的同一段计算相关系数,相关系数大,表明此速度可靠性高,然后用加权系数进行闭合差校正。用多段折线最优逼近解此类问题,当点数较少时,可用枚举法求解;但当点数较多时,使用遗传算法求解。这样,将枚举法与遗传算法结合起来,可较好地解决确定速度曲线分段点的精度和计算速度问题。对于与图2中速度点所在测线相交的测线交点处的速度曲线(图3中上、下两曲线),采用上述方法确定的分段点如表1所示,对各段求出校正量,采用沿t方向进行校正的方法,实 现了速度闭合(图3中的中间曲线)。该工区使用此方法后,所建速度场更加符合实际(与VSP平均速度数据比较)。
研究结论由于速度谱数据与地层倾角、测线与地层倾向的夹角有关,用速度谱数据导出的层速度数据稳定性较差,而平均速度稳定性较好,因此,测线交点处的速度闭合差校正只能针对平均速度进行。实例计算结果证明,本文提出的速度闭合差分段校正方法是一种有效且实用的方法,可提高速度场的精度,改善构造勘探的效果。
闭合差相关的文章

多疑是指神经过敏、疑神疑鬼的消极心态,属于精神心理科疾病。与生活环境、消极暗示、受过伤害等有关,因心理脆弱而过度自我保护。多疑分为内应多疑和外应多疑。内应多疑的主要表现为总是怀疑某人对自己不好,某件事对自己不利,便耿耿于怀,闷闷不乐,情绪立即反常,半天都不能排解;外应多疑的主要表现为的觉得被人怀疑后
斯图加特(德语:Stuttgart或译:斯图嘉特)位于德国西南部的巴登-符腾堡州中部内卡河谷地,靠近黑森林。不仅是该州的州首府,也是州级行政区及斯图加特地区首府和该州的第一大城市。同时也是该州的政治中心:巴符州议会、州政府,和众多的州政府机关部门均设在这里。由于其在经济、文化和行政方面的重要性,是德
菲利普·K·迪克美国的科幻小说作家代表作《高堡奇人》获雨果奖最佳小说奖菲利普·K·迪克(Philip K. Dick, 1928.12.16~1982.3.2)是美国的科幻小说作家,除了现在仍在发行的38本书外,他还写了一些短篇小说和少数作品出版在廉价的杂志上,其中至少有七部小说被改编成电影。虽然他


克里特岛希腊的第一大岛克里特岛(Κρήτη;Crete)位于地中海东部的中间,是希腊的第一大岛,总面积约8336平方公里,人口:约60.1万。行政上属于克里特大区。克里特岛是爱琴海最南面的皇冠,是美不胜收的度假之地。克里特岛位于希腊的南端,是爱琴海中最大的岛屿。距离非洲大陆仅有300公里。该岛东西长约260公里,南北宽最宽60公里,最窄只有12公里,克里特岛是一个以崎岖山地为主体的岛屿。构成岛上东

尚可名片
这家伙太懒了,什么都没写!
作者

