欧拉角用来唯一地确定定点转动刚体位置的三个一组独立角参量,由章动角θ、旋进角(即进动角)ψ和自转角j组成,为欧拉首先提出而得名。莱昂哈德·欧拉用欧拉角来描述刚体在三维欧几里得空间的取向。对于任何参考系,一个刚体的取向,是依照顺序,从这参考系,做三个欧拉角的旋转而设定的。所以,刚体的取向可以用三个基本旋转矩阵来决定。换句话说,任何关于刚体旋转的旋转矩阵是由三个基本旋转矩阵复合而成的。
精选百科
本文由作者推荐
欧拉角
物理学名词
中文名
欧拉角
外文名
Euler angles
提出者
莱昂哈德·欧拉
应用学科
数学
解释
欧拉角
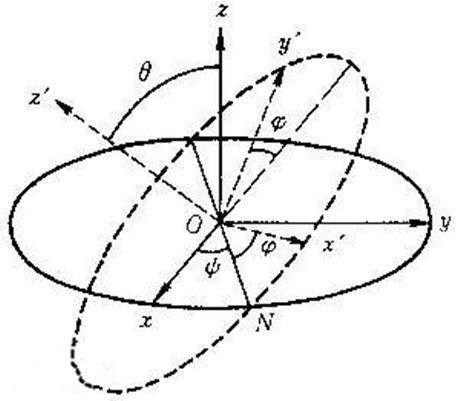
如右图所示,由定点O作出固定坐标系Oxyz以及固连于刚体的坐标系Oxˊyˊzˊ。以轴Oz和Ozˊ为基本轴,其垂直面Oxy和Oxˊyˊ为基本平面。由轴Oz量到Ozˊ的角度




若令Oˊyˊzˊ的原始位置重合于Oxyz,经过相继绕Oz、ON和Oz'的三次转动




式中R、Z ´、N、Z是转动算子,并可用矩阵表示如下:
在进行转动算子的乘法运算时,应从最右端做起。
如果刚体绕通过定点O的某一轴线以角速度ω转动,而ω在与刚体固连的活动坐标系Ox'y'z'上的投影为






反变换只须在同名坐标间对调记号。
由上式可以看出,如果已知

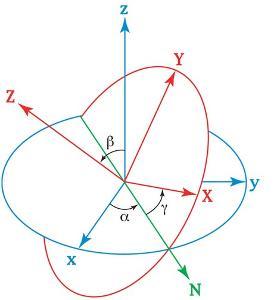
对于在三维空间里的一个参考系,任何坐标系的取向,都可以用三个欧拉角来表现。参考系又称为实验室参
考系,是静止不动的。而坐标系则固定于刚体,随着刚体的旋转而旋转。
参阅右图。设定 xyz-轴为参考系的参考轴。称 xy-平面与 XY-平面的相交为交点线,用英文字母(N)代表。zxz 顺规的欧拉角可以静态地这样定义:



很可惜地,对于夹角的顺序和标记,夹角的两个轴的指定,并没有任何常规。科学家对此从未达成共识。每当用到欧拉角时,我们必须明确的表示出夹角的顺序,指定其参考轴。
实际上,有许多方法可以设定两个坐标系的相对取向。欧拉角方法只是其中的一种。此外,不同的作者会用不同组合的欧拉角来描述,或用不同的名字表示同样的欧拉角。因此,使用欧拉角前,必须先做好明确的定义。
动态定义我们也可以给予欧拉角两种不同的动态定义。一种是绕着固定于刚体的坐标轴的三个旋转的复合;另外一种是绕着实验室参考轴的三个旋转的复合。用动态的定义,我们能更了解,欧拉角在物理上的含义与应用。特别注意,以下的描述,XYZ 坐标轴是旋转的刚体坐标轴;而 xyz 坐标轴是静止不动的实验室参考轴。
作用
欧拉角
欧拉角Eulerian angles用来确定定点转动刚体位置的3个一组独立角参量,由章动角






性质
欧拉角在SO(3)上,形成了一个坐标卡(chart) ;SO(3)是在三维空间里的旋转的特殊正交群。这坐标卡是平滑的,除了一个极坐标式的奇点在

类似的三个角的分解也可以应用到SU(2);复数二维空间里旋转的特殊酉群;这里,

应用
应用研究欧拉角广泛地被应用于经典力学中的刚体研究,与量子力学中的角动量研究。
在刚体的问题上,xyz坐标系是全局坐标系, XYZ 坐标系是局部坐标系。全局坐标系是不动的;而局部坐标系牢嵌于刚体内。关于动能的演算,通常用局部坐标系比较简易;因为,惯性张量不随时间而改变。如果将惯性张量(有九个分量,其中六个是独立的)对角线化,那么,会得到一组主轴,以及一个转动惯量(只有三个分量)。
在量子力学里,详尽的描述SO(3)的形式,对于精准的演算,是非常重要的,并且几乎所有研究都采用欧拉角为工具。在早期的量子力学研究,对于抽象群理论方法(称为Gruppenpest),物理学家与化学家仍旧持有极尖锐的反对态度的时候;对欧拉角的信赖,在基本理论研究来说,是必要的。
哈尔测度欧拉角的哈尔测度有一个简单的形式,通常在前面添上归一化因子

单位四元数,又称欧拉参数,提供另外一种方法来表述三维旋转。这与特殊酉群的描述是等价的。四元数方法用在大多数的演算会比较快捷,概念上比较容易理解,并能避免一些技术上的问题,如万向节锁(gimbal lock) 现象。因为这些原因,许多高速度三维图形程式制作都使用四元数。
参考资料
1.欧拉角(引用日期:2016-04-01)
欧拉角相关的文章

《娜娜》(英语:Nana)改编自矢泽爱的同名漫画,由大谷健太郎执导,矢泽爱、浅野妙子编剧,中岛美嘉、宫崎葵、松田龙平等人主演的日本音乐、剧情电影,于2005年9月3日在日本上映。
1917年俄国革命是1917年于俄国发生的一系列革命运动的统称,这些运动最终灭亡了俄罗斯帝国并建立了苏维埃俄国。在1917年3月(儒略历2月)的二月革命使得罗曼诺夫王朝被推翻,临时政府掌权。同年11月(儒略历10月)的十月革命使得临时政府遭推翻,被布尔什维克(苏维埃)政府取代。
炸鸡是一种用油炸制的鸡肉菜肴,其外皮酥脆,内部鲜嫩多汁,口感细腻丰富。炸鸡的最大特点是其多样化的口味,包括美式炸鸡、韩国炸鸡、泰式炸鸡、日式炸鸡、广式炸鸡、港式炸鸡等。炸鸡作为夜宵、外出用餐、野营食物都备受人们喜爱。
中华人民共和国(The People's Republic of China),简称“中国”,成立于1949年10月1日,位于亚洲东部,太平洋西岸,是工人阶级领导的、以工农联盟为基础的人民民主专政的社会主义国家,以五星红旗为国旗、《义勇军进行曲》为国歌,国徽内容为国旗、天安门、齿轮和麦稻穗,通用语言
奥涅加河属俄罗斯北部河流。源出拉恰湖,曲折北流,注入白海奥涅加湾。长416公里,流域面积5.69万平方公里。河床多石滩,仅局部通航,以木材流送为主。12月初至次年5月结冰。河口有奥涅加市。

尚可名片
这家伙太懒了,什么都没写!
作者