
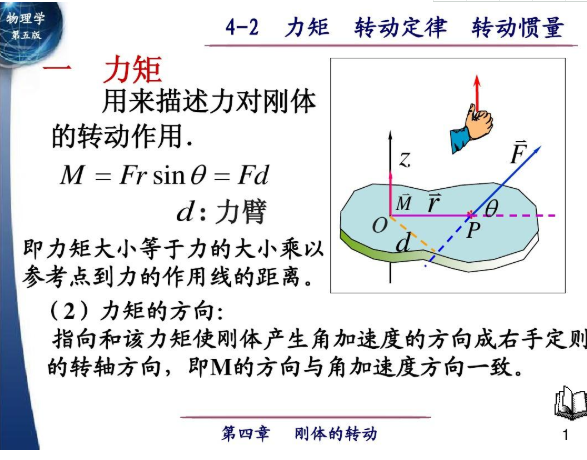
力矩表示力对物体作用时所产生的转动效应的物理量。力和力臂的向量积为力矩。力矩是矢量(vector)。力对某一点的力矩的大小为该点到力的作用线所引垂线的长度(即力臂)乘以力的大小,其方向则垂直于垂线和力所构成的平面用力矩的右手螺旋法则来确定。力对某一轴线力矩的大小,等于力对轴上任一点的力矩在轴线上的投影。国际单位制中,力矩的单位是牛顿·米。常用的单位还有千克力·米等。力矩能使物体获得角加速度,并可使物体的动量矩发生改变,对同一物体来说力矩愈大,转动状态就愈容易改变。
精选百科
本文由作者推荐
力矩
力对物体产生转动作用的物理量
中文名
力矩
外文名
torque;moment of force
分类
物理学矢量
单位
牛顿·米(N·m)
转动力矩
转矩或扭矩
希腊字母
tau
应用学科
物理
表达式
M=L×F
见载刊物
《机械工程名词(第一分册)》科学出版社
公布时间
2000年
矢量性
矢量
定义
力矩(moment of force)力对物体产生转动作用的物理量。可以分为力对轴的矩和力对点的矩。即:M=LxF。其中L是从转动轴到着力点的距离矢量,F是矢量力;力矩也是矢量。
力对轴的矩力对物体产生绕某一轴转动作用的物理量,其大小等于力在垂直于该轴的平面上的分量和此分力作用线到该轴垂直距离的乘积。例如开门时,外力F平行于门轴的分力FП不能对门产生转动作用(图1),因为这力已被固定轴的约束力(见约束)所平衡。对门能起转动作用的力是F在垂直于门轴的平面上的分力F⊥,其数值F⊥=Fcosα。自F的作用点A作垂直于轴的平面П,与轴相交于O点。由实验得知,力F对物体的转动作用与O至F⊥的垂直距离l成正比。l称为F⊥对轴的力臂,它等于rsinβ,其中r=OA;β是F⊥与OA的夹角。因此,力F对物体的转动作用由Fcosα和rsinβ的乘积来确定,这个物理量称为力F对轴的矩,它是个代数量。当α=0°和β=90°时,力F对轴的矩最大,因此,要提高转动效率,作用力F应在轴的垂直平面内,并使其垂直于联线OA。如果力F在轴的垂直平面内(图2),力对轴的矩为rFsinβ。此量也可用△OAB面积的二倍来表示,其中AB=F。
力对点的矩
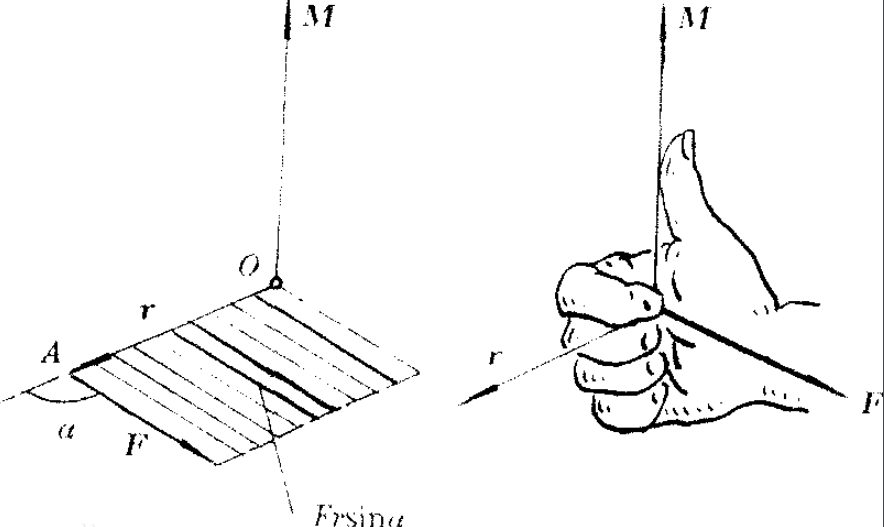
力对物体产生绕某-点转动作用的物理量,等于力作用点位置矢和力矢的矢量积。倒如,用球铰链固定于O点的物体受瞬时力F的作用,F的作用点为A,r表示A的位置矢,r与F的夹角为α(图3)。若物体原为静止,受力F作用后,将沿一垂直于r和F组成的平面并通过O点的瞬时轴转动。转动作用的大小由rFsinα表示。由于瞬时轴有方向性,因此将力F对点O之矩定义为一个矢量,用M表示,即M=r×F。M的正向可由右手定则决定(图4);M的大小等于以r和F为边的三角形面积的二倍。
力F对O点的矩M,在过矩心O的直角坐标轴上有三个投影Mx、My、Mz。可以证明,Mz就是F对z轴的矩(图5)。
上述力矩概念中的"轴"和"点"都取自实物。但研究力学问题时可以不必考虑这些实物,对空间任何点和线都可以定义力对点的矩和力对轴的矩。
力矩的量纲是力×距离;与能量的量纲相同。但是力矩通常用牛顿
-米,而不是用焦耳作为单位。力矩的单位由力和力臂的单位决定。
力矩
单位
单位变换
力矩的量纲是距离乘以力;依照国际单位制,力矩的单位是牛顿-米。虽然牛顿与米的次序,在数学上,是可以变换的。BIPM(国际重量测量局)设定这次序应是牛顿-米,而不是米-牛顿。
国际单位制
依照国际单位制,能量与功量的单位是焦耳,定义为 1 牛顿-米。但是,焦耳不是力矩的单位。因为,能量是力点积距离的标量;而力矩是距离叉积力的伪矢量。当然,量纲相同并不仅是巧合;使1牛顿-米的力矩,作用一全转,需要恰巧 2*Pi 焦耳的能量。
争议
事实上,力矩与能量的关系是能量和一个对数矢量2π[lnK]的乘积,即t=2πQ[lnK],[lnk]的方向垂直于作用平面。因此用焦耳做单位也不是错误的。做圆周运动时,K=e,因此使1牛顿-米的力矩,作用一全转,需要恰巧2*Pi焦耳的能量。
性质
1.力F对点O的矩,不仅决定于力的大小,同时与矩心的位置有关。矩心的位置不同,力矩随之不同。
2.当力的大小为零或力臂为零时,则力矩为零。
3.力沿其作用线移动时,因为力的大小、方向和力臂均没有改变,所以,力矩不变。
4.相互平衡的两个力对同一点的矩的代数和等于零。
应用
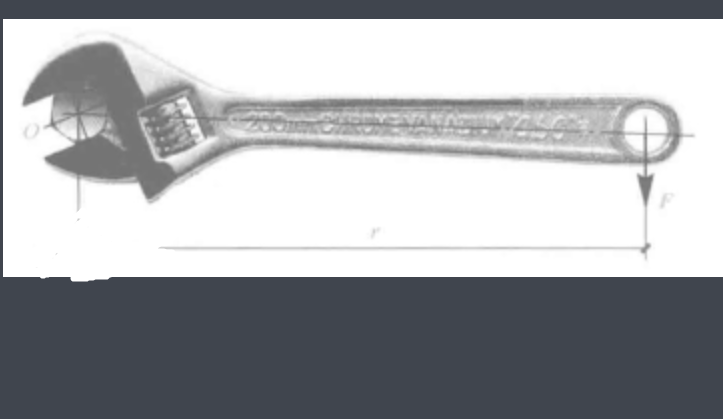
在生活中用扳手拧紧螺母时,作用于扳手上的力F使扳手绕O点转动,手上用的力F越大,螺帽拧得越紧。这说明,使扳手绕支点O的转动效应不仅与力F的大小成正比,而且与支点O到作用线的垂直距离r(称力臂)也成正比。引用“力矩”来度量力使物体绕支点(称为矩心)转动的效应。力F对矩心0点的矩简称力矩,用M(F)表示,其大小等于力F的大小与力臂r的乘积,即M(F)=F·r,如图3所示。
力矩
观念介绍
静力当一个物体在静态平衡时,静作用力是零,对任何一点的净力矩也是零。关于二维空间,平衡的要求是:
x,y方向合力均为0,且合力矩为0。
动力力矩是角动量随时间的导数,就像力是动量随时间的导数。
刚体的角动量是转动惯量乘以角速度。
什么是力矩电动机
所谓的力矩电动机是一种扁平型多极永磁直流电动机。其电枢有较多的槽数、换向片数和串联导体数,以降低转矩脉动和转速脉动。力矩电动机有直流力矩电动机和交流力矩电动机两种。
其中,直流力矩电动机的自感电抗很小,所以响应性很好;其输出力矩与输入电流成正比,与转子的速度和位置无关;它可以在接近堵转状态下直接和负载连接低速运行而不用齿轮减速,所以在负载的轴上能产生很高的力矩对惯性比,并能消除由于使用减速齿轮而产生的系统误差。
交流力矩电动机又可以分为同步和异步两种,常用的是鼠笼型异步力矩电动机,它具有低转速和大力矩的特点。一般地,在纺织工业中经常使用交流力矩电动机,其工作原理和结构和单相异步电动机的相同,但是由于鼠笼型转子的电阻较大,所以其机械特性较软。
相关概念
刚体的力矩
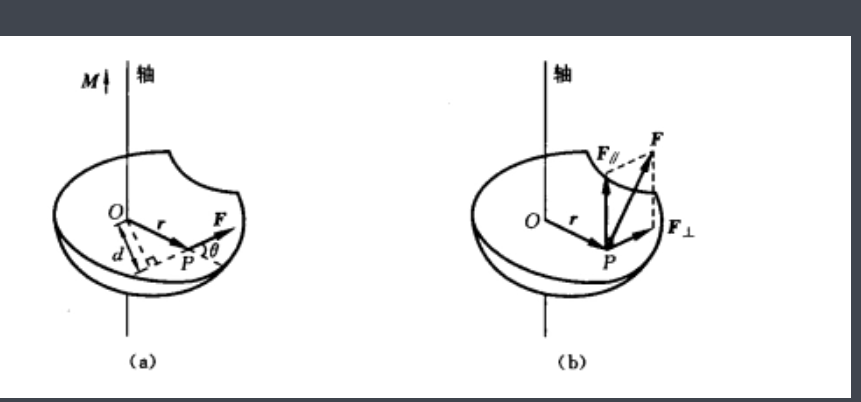
若作用在刚体上的外力在垂直于转轴的平面内,如图4(a)所示,则外力F对该转轴的力矩M为M=r×F。M的大小为M=Frsinθ=Fd;M的方向垂直于r与F构成的平面,可用右手螺旋定则确定,在定轴转动中,力矩M的方向是沿着转轴的。若作用在刚体上的外力不在垂直于转轴的平面内,如图4(b)所示。因定轴转动中,平行于转轴的外力对刚体的绕轴转动不起作用,力F在平面内的分矢量才对刚体转动产生影响。将力F分解为平行于转轴的分力F和垂直于转轴的分力F⊥只有分力F能使刚体转动,则力矩可写成M=r×F⊥在定轴转动中,如果力F经过转轴,则力矩M等于零,不能使刚体转动;如果几个外力同时作用在一个绕定轴转动的刚体上,且这几个外力都在与转轴垂直的平面内,则它们的合外力矩等于这几个外力矩的代数和。若刚体内各质点间存在相互作用力(内力),由于质点间的作用力总是成对出现,并遵守牛顿第三定律,故在讨论刚体的定轴转动时,这些内力对转轴的合内力矩为零。
力矩
定轴转动的转动定律
刚体定轴转动时的运动状态的改变取决于施加于刚体上的合外力矩M。正如质点所受合力是产生加速度a的原因一样,M是产生角加速度a的原因。在外力矩给定情况下,刚体的转动惯量大,则所获得的角加速度小,即角速度改变得慢,也就是保持原有转动状态的惯性大;反之,刚体的转动惯量小,则所获得的角加速度大,即角速度改变得快,也就是保持原有转动状态的惯性小。转动定律是刚体定轴转动的动力学量化公式,是质点系角动量定理在刚体定轴转动时的特殊形式,也是刚体定轴转动时的瞬时规律。如果力矩与力相对应,转动惯量与质量相对应,角加速度与加速度相对应,显然转动定律与牛顿第二定律的形式类似,其地位相当于质点动力学中的牛顿第二定律。
力矩相关的文章

湖南省,简称湘,是中华人民共和国的省级行政区,位于中国的中南部,省会城市为长沙。截至2022年,湖南省境域面积21.18万平方千米,辖13个地级市、1个自治州,常住人口为6604万人。
生产建设兵团是指新中国成立后陆续组建的各类生产建设兵团,是中国通过军垦这种特殊体制达到巩固边防,发展经济,安置人员的目的,兵团成为党、政、军权合一,工、农、兵、学、商五位一体的半军事化组织和社会经济体系,尽管如今只有新疆生产建设兵团存在,但是在那段激情燃烧的岁月里,全国却陆续出现过12个兵团,3个农

胰岛素蛋白质激素名称胰岛素(Regular insulin)可增加葡萄糖的利用,能加速葡萄糖的无氧酵解和有氧氧化,促进肝糖原和肌糖原的合成和贮存,并能促进葡萄糖转变为脂肪,控制糖原分解和糖异生,因而能使血糖降低。此外,本品能促进脂肪的合成。抑制脂肪分解,使酮体生成减少,纠正酮症酸血症的各种症状。能促进蛋白质的合成,抑制蛋白质分解。本品和葡萄糖同用时,可促使钾从细胞外液进入组织细胞内。

尚可名片
这家伙太懒了,什么都没写!
作者
