
拉降装置(Pull down device)是指舰载直升机在风浪情况下着中、小舰船的助降设备。由机载和舰载两部分组成。机载部分包括吊车、拉降管、锁紧装置等,舰载部分包括快速夹运装置、绳索、绞车及控制系统等。
精选百科
本文由作者推荐

拉降装置
舰载直升机的助降设备
外文名
Pull down device
系列
E系统,RAST系统,ASIST系统
性质
一种舰载直升机的助降设备
简介
直升机的机动性和它适于海上使用的潜力早已被世界各国海军所认识。从第二次世界大战以来,直升机已用于在海上执行搜索与救援、通讯联络、运输补给、反潜和攻击水面舰艇等各种任务。现在,水面舰艇搭载直升机的配合使用是现代化战舰必备的条件之一。
由于航空母舰和搭载直升机的大型舰船在海上航行受风浪影响较小,舰船平稳,飞行甲板面积又较大,所以舰载直升机在其上起飞和降落不需要特别的辅助设施。但是,直升机在诸如护卫舰和驱逐舰等中小型舰船上起落就困难了。这主要是因为中小型舰船的横摇、纵摇和升沉运动量大,会使直升机在甲板上滑动甚至翻倒。其次是中小型舰船上的飞行甲板因受舰船尺寸限制不可能做得很大,这就要求直升机准确地降落在降落点上并且不滑动,以免与舰上的机库和其他物品相碰撞或滑出甲板掉人海中。再就是直升机受舰船上层建筑物产生的扰动气流和海风的影响都比较明显。
为了使直升机安全地在中小型舰船上起飞降落,人们研究了一些方法,但目前投入使用的只有鱼叉格栅法和拉降法两种。其中拉降法相对应的就是拉降装置,是指舰载直升机在风浪情况下着中、小舰船的助降设备。以下介绍拉降装置的使用与发展。[1]
E系统
加拿大的英德尔技术公司于1971年研制出世界上第一套舰载直升机拉降系统。这套命名为E系统的拉降系统现在看来十分原始,但值得注意的是E系统打开了直升机拉降助降的大门。
E系统的正式名称是“直升机着舰辅助及固定系统”。这套系统虽然有E500、E1000及E2000等3种型号,但仅适用于少数美国制造的直升机,如:休斯500、贝尔212、SH-60、“海王”和SH-2“海妖”直升机。
从使用观点来看,E系统所能提供的功能仅及现代助降系统的一半。当直升机准备着舰时,机上的绞车必须放下拉降索,舰上飞行甲板人员将其固定在系统上。一旦完成连接,直升机一面下降一面收卷拉降索以保持张紧状态,直到直升机接触甲板为止。此时在引降员的控制下,这根拉降索所承受的拉力将达4000公斤。然后将直升机调整到正对机库方向,至此整个作业时间超过10分钟。由于作业时间较长、安全性差及系统重量过重(约9000公斤)等因素,美国海军始终没有采用,只有印度海军于1977~1978年间,为其塔拉吉里级护卫舰采购2套E2000型系统,供“海王”直升机使用。
RAST系统
E系统虽然没有打开市场,但其设计思想却派生出另一套较为实用的系统,即所谓的“着舰辅助、固定与牵引系统”,简称RAST系统。这套系统问世至今已有24年,目前215套为各国与地区海军所使用(其中包括台湾的成功级护卫舰)。这套系统的主要引人之处,在于具有全天候昼夜使用,适用机种广泛,可在5级海况(即横摇±31°、纵摇±9°、升沉6.1米/秒)下使用等优点。
RAST系统可完成3项功能:帮助飞行员将直升机定位与降落;降落后把直升机固定在飞行甲板上;校正直升机位置,使其处于甲板中央,把它牵进或牵出机库。
RAST系统由机载设备和舰上设备两部分组成。机载设备有拉降主探管与引索绞车、尾探管和机上控制板;舰上设备有拉降索与牵引绞车、俗称“拉降井”的夹运装置和控制台。
直升机降落前,首先要把拉降井准确地拉到安放拉降索的位置上,松开卷筒刹车拉出拉降索,盘成圈放在甲板上。直升机降落时,应从舰尾慢慢飞向甲板,并在甲板上方6~9米处悬停,同时放下引索。为了放掉飞机上的静电荷,甲板上的人员使用一副接地金属夹具抓住引索然后把拉降索和引索连接起来。飞行员操纵引索绞车把拉降索拉到直升机内锁住,方可开始拉降。引降员开动绞车把拉降索慢慢地拉人舰内。当拉降索成为张紧状态时,引降员使绞车产生910公斤的拉力,而飞行员则使直升机的升力与此相匹配,使直升机悬停。
当舰船运动处于相对平稳,引降员判定可以让直升机着舰时,他便将绞车的拉力增加到1800公斤。这个张力使直升机具有对准拉降井的对中作用,并使飞行员能感觉到未对准的误差。在拉降索这个恒定的拉力下,飞行员控制直升机旋翼拉力的大小使直升机下降着舰。在直升机下降过程中,如果必要,飞行员可操纵放开拉降索中断着舰,直升机飞离舰船。直升机一着舰,机腹下的主探管就被拉降井内的夹紧装置夹紧,拉降索脱开。这样就把直升机固定在甲板上了。为了进一步限制直升机在飞行甲板上的横向运动,飞行员操纵作动器伸出尾探管,插入飞行甲板上的特设沟槽内。然后用直升机尾部导引绞车系统调整直升机的方向,使直升机与拉降井运动导轨对齐。这时,关闭直升机发动机,折叠旋翼桨叶,开动甲板牵引绞车,将直升机自动牵引进人机库。
RAST系统在直升机起飞时,可由拉降井以相反方向将直升机牵引至起落区,就位后拉降井放开机腹主探管,允许直升机起飞。
目前各国海军使用最多的助降系统也就是RAST系统,包括美国、加拿大、日本、印度、阿根廷、澳大利亚和西班牙以及台湾地区。其中值得一提的是,在亚洲各国海军中,日本于43年以前就率先为配备在日根级、榛名级、朝雾级驱逐舰上的直升机引进了RAST系统。
RAST系统虽然有效地提高了直升机着舰时的安全性,而且也取消了人力式的推进推出机库作业,但美中不足的是系统轨道过重(约5443公斤),因此不适合中型吨位(约2000吨)以下的舰船使用。此外RAST也不是全自动化的系统,当直升机在甲板上空悬停准备拉降时,甲板人员必须在现场待命,将直升机放下的引索与拉降索连接起来。此一工作若在恶劣气候条件下进行时,将对人员安全有所影响。这些缺点促使英德尔公司考虑对RAST进行第2代的改进。
英德尔公司于1984年与美国Gibbs&Cox公司合作,研制出不锈钢的轻型轨道。轻型轨道的重量只有原型轨道的一半,成本节省60%,寿命却提高很多。澳大利亚海军于1992年采用了这种轻型轨道的第2代RAST系统。[1]
ASIST系统
英德尔公司继RAST系统之后推出了世界上第一套全自动助降系统,它的名称是“综合锁紧与牵引系统”,简称ASIST系统。这套系统的设计思想与E系统和RAST系统的拉降概念不同,它不采用拉降索把直升机拉降到甲板上,而是直升机直接降落到甲板上,然后快速锁紧固定,不需要甲板人员的帮助,完全自动进行。
ASIST系统的装置也是分为直升机及舰上两部分。装在舰上的装置有:快速锁紧装置、轨道、红外线跟踪器、目视降落标志以及机库内的液压动力绞车等。直升机上部分则有装在机腹下的探管及机身两侧的红外线发射器。
直升机要降落时,飞行员以正常程序进场和悬停在甲板上空。飞行员得到舰上引降员允许降落的信号后,便根据直升机与舰船的位置参考系统使直升机下降。这个位置参考系统是通过在机库门顶上的目视标志给出的。除了陀螺稳定的水平参考杆外,位置参考系统又向飞行员提供V形彩色灯显示,告诉飞行员要飞行的方向,以便直升机降落在规定的降落区内。这些目视标志是根据红外位置感受系统的数据给出的。红外位置感受系统是由装在直升机两侧的每侧4个红外线发射器和装在舰船甲板上两侧各一个红外线跟踪器构成的。
由这个位置参考系统向飞行员给出直升机纵向和横向位置的信息使直升机在降落时,特别是在夜间和能见度差的条件下降落时可增加直升机的安全性。位置感受系统的数据除了向飞行员提供目视降落标志外,还用来跟踪直升机位置,以使快速锁紧装置与直升机保持同步运动,而始终处于直升机机腹下主探管所指位置的后面近处。
快速锁紧装置前面有一宽度为1.83米开口的凹形装置,其左前臂内有锁钩。锁紧装置能在甲板上较大位置范围内锁住直升机,这个范围是4.65平方米,以便适应在不用拉降索后直升机降落点分散度较大的情况。
位置感受系统不断跟踪下降中的直升机并输出位置信号。该系统输出的纵轴位置信号控制一台变速电动牵引绞车,该绞车使快速锁紧装置位于直升机主探管所指位置的后面近处。在位置感受系统跟踪过程中,快速锁紧装置以每钞1.5米的速度在甲板上运动。
在直升机着舰后,快速锁紧装置迅速朝主探管移动,其前部的光电传感器在快速锁紧装置碰到主探管之前自动使其运动速度降低到每秒0.3米。在碰到主探管之后,两臂间的压力板被压缩以吸收撞击能并触动机械传感器杆,向快速锁紧装置发出停止前进的信号。这时锁钩自动向右横向运动,锁住直升机主探管。锁钩横向运动的初始速度为每秒1.8米,光电传感器感受到锁钩将要碰到直升机主探管时自动地将运动速度降至每秒0.3米。
锁钩锁紧主探管将直升机固定在甲板上时,引降员的控制台上会发出指示信号。直升机降落锁紧过程只需2秒钟。
直升机不可能每次都正好降落在甲板牵引轨道上并与之对齐,锁钩又能使直升机移动到与牵引轨道对齐以便被牵引到机库中去。引降员通过操纵杆使锁钩对主探管施加横向压力,同时刹住牵引绞车,由于直升机主机轮与主探管的相互位置关系而使尾轮(或前轮)转向。在快速锁紧装置的纵向牵引运动和锁钩的横向压力的综合作用下直升机将与牵引轨道对齐,同时保持直升机被锁住在甲板上而不能滑动和翻倒。
一旦直升机与牵引轨道对齐,尾探管(或前探管)可放下插入甲板沟槽内。引降员通过操纵杆将直升机牵引进人机库。快速锁紧装置上的锁钩只需作少量横向运动以保持直升机在要求的牵引轨道上。
直升机起飞时,顺序与上述相反,也是自动完成的。使用ASIST系统时,不需甲板辅助人员的帮助,其重量只有3110公斤,是现有助降系统中最轻的,而且适用的机种更广泛,包括“超美洲豹”、“海豚”、EH-101、SH-2“海妖”、SH-60“海鹰”、“海王”和“山猫”等直升机。[1]
参考资料
1.豫章. 舰载直升机拉降装置的发展[J]. 直升机技术,1998,(04):40-43.(引用日期:2019-04-30)
拉降装置相关的文章

芳香油(Ethereal oils)是植物体新陈代谢的产物,由细胞原生质体分泌产生,大多具挥发性,有芳香的气味,故又称挥发油( Volatile oils ),在香料工业中又称精油(Essential oils )。其成分包括烃类、醇类、酯类、酮类、醚类、酸类、酚类、胺类以及杂环衍生物。常呈小油滴状
木卫二(Europa,古希腊语:Ευρώπη),又称为欧罗巴,是木星的第六颗已知卫星,也是木星的第四大卫星。在1610年被伽利略发现后,木卫二由西门·马里乌斯独立发现。木卫二的公转轨道距离木星第五近,稍微比月球小。 木卫二是一个温和的世界,表面覆盖着冰层,底层是一片海洋。科学家认为,地球上海洋孕育了
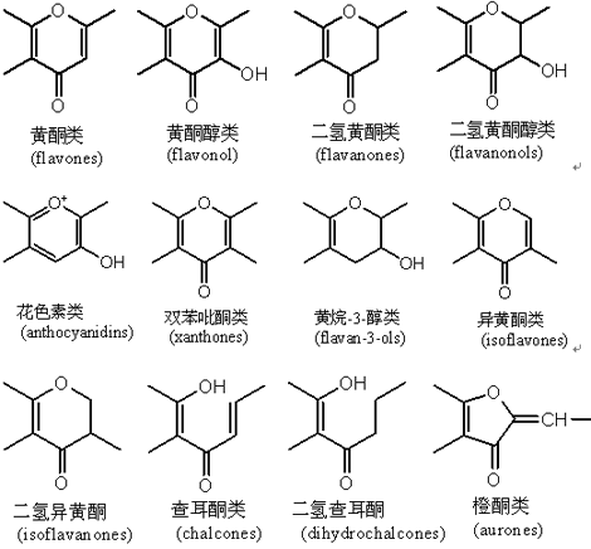
黄酮黄酮类化合物的总称黄酮(flavone),是黄酮类化合物的总称,泛指两个具有酚羟基的苯环(A-与B-环)通过中央三碳原子相互连结而成的一系列化合物。黄酮类化合物结构中常连接有酚羟基、甲氧基、甲基、异戊烯基等官能团。黄酮类化合物(英语:Flavonoid,又称类黄酮)是指基本母核为2-苯基色原酮类化合物,现在则泛指两个具有酚羟基的苯环通过中央三碳原子相互连接的一系列化合物。他们来自于水果、蔬菜、
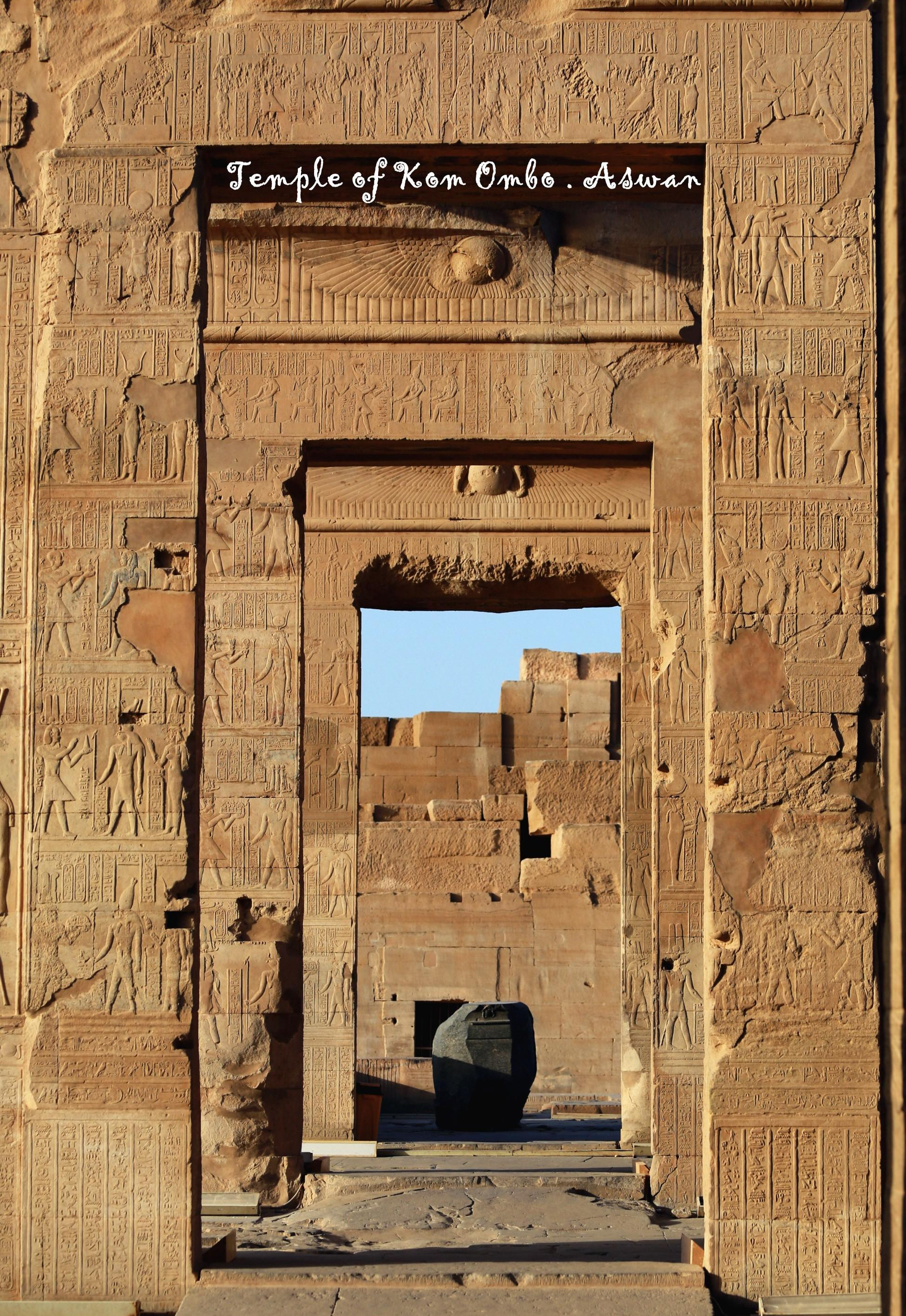
阿斯旺(阿拉伯语:أسوان),埃及南部城市,阿斯旺省首府,位于尼罗河东岸,人口约20万,著名古城、旅游景点和贸易中心。阿斯旺是世界上最干燥的地方之一,自2006年5月13日以来,阿斯旺没测得任何降水。在古埃及时期,阿斯旺被认为是埃及民族的发源地。它位于尼罗河第一瀑布以北,是埃及和努比亚之间的贸易重镇,其名据说是古埃及语“贸易”一词的对音。

尚可名片
这家伙太懒了,什么都没写!
作者
